
 English
English Deutsch
Deutsch Русский
Русский Français
Français 한국어
한국어 日本語
日本語
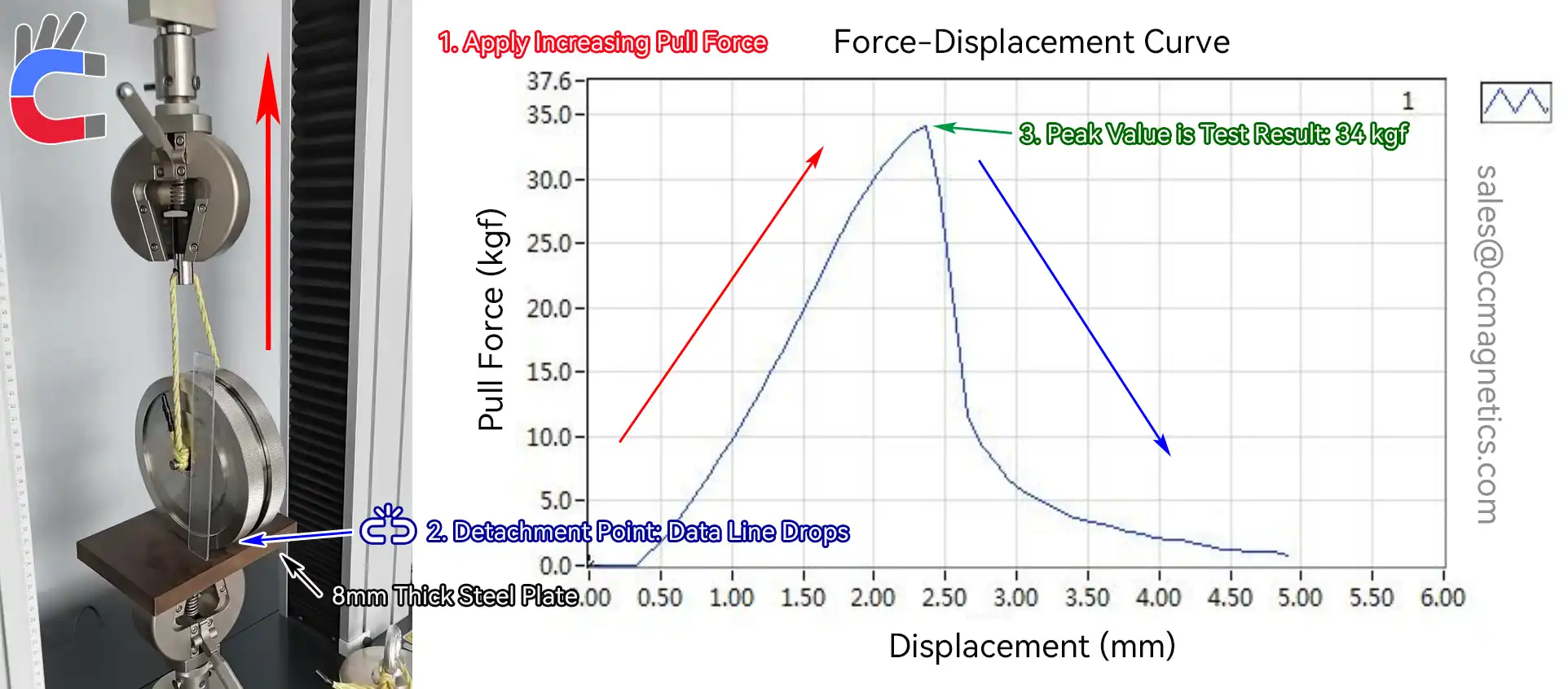
Normalmente, CCmagnetics proporciona un informe de prueba de tracción para cada cliente que utiliza nuestra serie WM de ruedas magnéticas para robots. El informe de prueba indica la fuerza de tracción máxima. Por ejemplo, una rueda magnética con una fuerza de tracción máxima de 34 kgf, cuando se usa en una configuración de cuatro ruedas con un factor de seguridad de 4, puede suspender de manera segura 34 kg de peso. Es crucial comprender que la capacidad de carga de la rueda magnética incluye el peso de la propia rueda. Por lo tanto, debe tener en cuenta este peso al seleccionar ruedas para su robot. Las fórmulas detalladas y los métodos de cálculo se proporcionan más adelante en este artículo.
Además, la capacidad de carga real en aplicaciones del mundo real se ve afectada por varios factores. Estos incluyen la pendiente, la curvatura, el grosor y el material de la superficie metálica sobre la que opera la rueda magnética del robot, así como la presencia de objetos extraños. Si la rueda tiene neumáticos también juega un papel importante. Si no está seguro de estos factores o necesita ayuda para seleccionar la rueda adecuada, proporcione a nuestro personal detalles sobre el entorno de trabajo de su robot y su peso total. Nuestro equipo estará encantado de ayudarle.
¿Qué son las Ruedas Magnéticas para Robots?
Las ruedas magnéticas para robots están diseñadas para adaptarse a diversas estructuras de superficie complejas. En su interior, generalmente están fabricadas con imanes permanentes de Neodimio, mientras que el exterior utiliza materiales como acero inoxidable y caucho, lo que les permite adherirse firmemente a superficies metálicas.
Son componentes esenciales utilizados en robots para tareas específicas, como:
- Robots de limpieza de cascos de barcos
- Robots de arenado y pintura para astilleros
- Robots de limpieza de tanques
- Orugas magnéticas para cascos
- Robots de limpieza de embarcaciones
- Robots de limpieza de cascos submarinos
Su fuerte fuerza magnética les permite permanecer adheridas durante períodos prolongados en superficies curvas de barcos y superficies redondas de tanques de petróleo. Desempeñan un papel vital en los trabajos de mantenimiento en barcos, tanques de petróleo, tuberías y estructuras metálicas similares.

Transmisión magnética
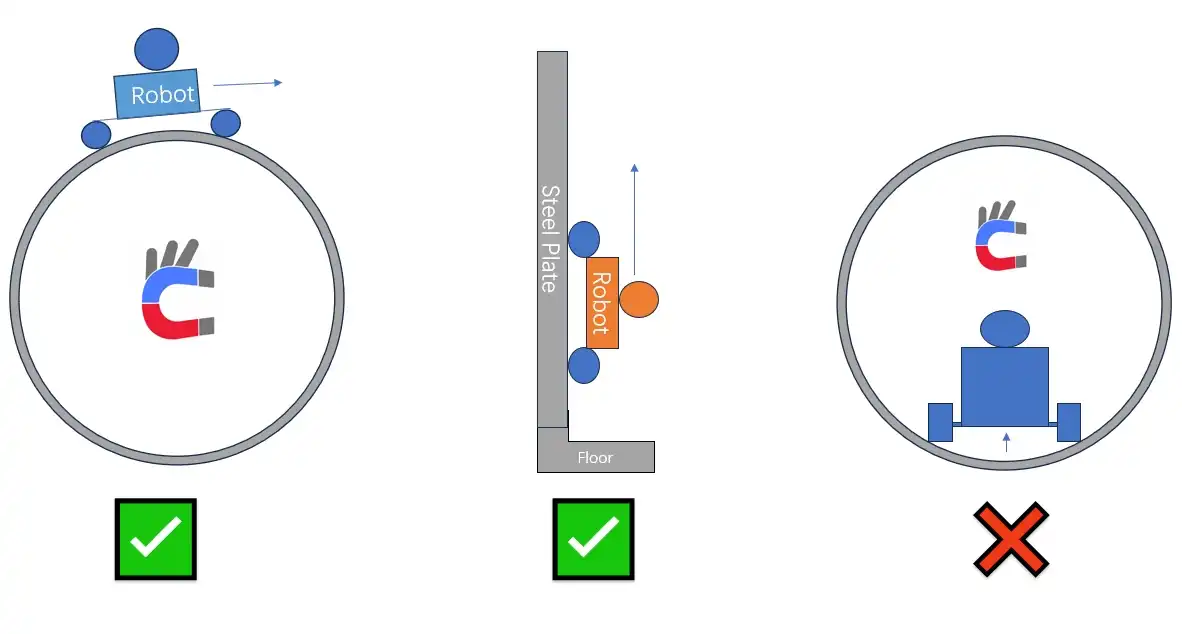
Un desafío clave al seleccionar ruedas magnéticas para robots trepadores de paredes es calcular con precisión su capacidad de carga vertical. Sin embargo, determinar la capacidad de carga en el mundo real de las ruedas magnéticas no se basa solo en el informe de prueba de tracción. También debe tener en cuenta el entorno de trabajo específico del robot y la condición (como objetos extraños y espacios) de la superficie metálica durante el cálculo.
¿Cómo Calcular la Carga de la Rueda Magnética del Robot?
Calcular cuánto peso puede sostener verticalmente una rueda magnética de robot es crucial para diseñar robots seguros y efectivos. Aquí hay un desglose:
1. Definición Básica y Fórmula
kgf (Kilogramo-fuerza): Esta unidad mide la fuerza. Piense en ella como la fuerza ejercida por la gravedad sobre una masa de 1 kilogramo. En nuestro contexto, 34 kgf significa que una sola rueda magnética puede proporcionar una fuerza de sujeción vertical máxima equivalente al peso de unos 34 kg (que son aproximadamente 333,2 Newtons o N).
Cálculo de la Capacidad de Suspensión:
El peso máximo que puede suspender de manera segura utilizando una rueda magnética se calcula utilizando su fuerza de tracción y un Factor de Seguridad (SF).

2. Elegir el Factor de Seguridad (SF)
El Factor de Seguridad es un multiplicador utilizado para crear un margen de seguridad, teniendo en cuenta las variaciones y fuerzas inesperadas. Un SF más alto significa un mayor margen de seguridad. Aquí hay algunas recomendaciones:
| Escenario | Factor de Seguridad Recomendado (SF) | Explicación |
|---|---|---|
| Carga Estática | 2 - 3 | Para uso estacionario. Considera la fatiga del material. |
| Carga Dinámica | 4 - 5 | Para robots en movimiento. Considera inercia, vibración, etc. |
| Áreas de Alto Riesgo | ≥6 | Garantiza la seguridad incluso en condiciones extremas (por ejemplo, trabajo a gran altura). |
3. Capacidad de Suspensión de Una Sola Rueda
Calculemos la capacidad segura para una sola rueda:
Ejemplo: Una rueda magnética de 34 kgf utilizada en una operación dinámica (usando SF=4).

Nota: Estos 8,5 kg son la porción del peso seguro del robot que una rueda puede soportar.
4. Capacidad de Suspensión Total del Vehículo
Si su robot utiliza varias ruedas (como un diseño de cuatro ruedas), la capacidad de suspensión total es la suma de la capacidad segura de cada rueda.

Donde n es el número de ruedas.
Ejemplo: Un robot de cuatro ruedas que utiliza cuatro ruedas de 34 kgf para tareas dinámicas (SF=4).

5. Ajustes del Mundo Real
Los cálculos anteriores proporcionan una línea base. En la práctica, debe ajustar según el entorno de trabajo real:
(1) Operación en Superficies Inclinadas
Al subir pendientes (como en el casco de un barco), la gravedad tira del robot hacia abajo, reduciendo la fuerza magnética efectiva disponible para el soporte vertical.
En una pendiente con ángulo θ, la fuerza de sujeción efectiva se reduce por el coseno del ángulo.

Ejemplo: En una pendiente de 30°, con una fuerza magnética total de 136 kgf (de 4 ruedas) y SF=4.

(2) Cargas de Impacto (Paradas/Arranques Repentinos)
Si su robot necesita detenerse o acelerar rápidamente, la inercia crea fuerzas adicionales (cargas de impacto) que el agarre magnético debe soportar. Esto aumenta efectivamente la carga.

Donde:
- a es la aceleración/desaceleración.
- g es la aceleración debida a la gravedad (aprox. 9,8 m/s²).
Ejemplo: Un peso estático del robot de 34 kg experimentando una aceleración de a=3m/s².

6. Recomendaciones de Ingeniería
-
Coincidencia de Carga:
Para suspender de forma segura un robot que pesa 34 kg:
- Para escenarios dinámicos: Necesitaría al menos una capacidad total que coincida con el cálculo del
Peso Suspendido Total(por ejemplo, 4 ruedas @ 34 kgf con SF=4). - Para escenarios estáticos: Podría necesitar menos (por ejemplo, 2 ruedas @ 34 kgf con SF=2), pero considere la seguridad.
- Para escenarios dinámicos: Necesitaría al menos una capacidad total que coincida con el cálculo del
-
Redundancia: A menudo se recomienda que la fuerza magnética total disponible sea al menos 5 veces el peso objetivo. Esto proporciona un margen significativo para fuerzas inesperadas o problemas en la superficie.
-
Pruebas de Campo: Verifique siempre la fuerza de sujeción real utilizando un medidor de fuerza de tracción en la superficie objetivo. Los datos de laboratorio a veces pueden sobreestimar el rendimiento en condiciones del mundo real.
7. Tabla de Referencia Rápida
Aquí hay una tabla simple basada en una rueda de 34 kgf para estimaciones rápidas:
| Fuerza Magnética de Una Rueda (kgf) | Factor de Seguridad (SF) | Capacidad Segura de Una Rueda (kg) | Capacidad Total del Sistema de Cuatro Ruedas (kg) |
|---|---|---|---|
| 34 | 2 | 17 | 68 |
| 34 | 4 | 8,5 | 34 |
| 34 | 6 | ≈5,7 | ≈22,8 |
Factores que Afectan el Rendimiento de la Rueda Magnética del Robot y su Factor de Seguridad
Aunque la prueba de tracción proporciona una línea base, varios factores del mundo real influyen en la fuerza magnética real y el Factor de Seguridad que debe utilizar:
-
Propiedades de la Superficie Metálica:
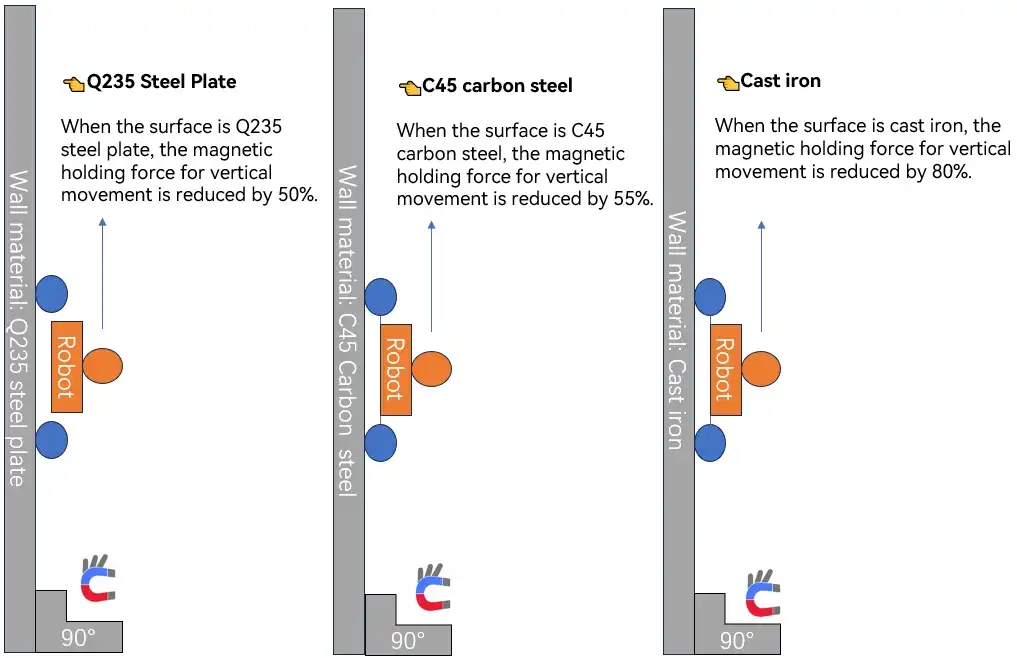
- Grosor y Grado: Generalmente, la superficie metálica debe ser más gruesa de 5mm para que la rueda magnética alcance su fuerza de tracción potencial total. Sin embargo, el tipo o 'grado' de metal específico también importa significativamente. Diferentes aleaciones de metal, como varios grados de acero (por ejemplo, acero Q235 frente a otros), darán como resultado diferentes fuerzas de adhesión.
-
Espacio (Gap) entre la Rueda y la Superficie:
- Cualquier espacio entre la rueda magnética y la superficie metálica, a menudo causado por el neumático de la rueda, óxido, pintura o escombros, reducirá la atracción magnética.
- Cuanto mayor sea el espacio, más débil será la succión.
- En CCmagnetics, tenemos una amplia experiencia y datos sobre cómo los espacios afectan la succión de la rueda magnética, respaldados por datos de numerosos proyectos de clientes. Compartimos abiertamente este conocimiento para ayudar a nuestros clientes.

Neumático de Rueda Magnética de Robot
Otros Consejos para la Selección de Ruedas Magnéticas
- El Ancho Importa Más que el Diámetro: Un malentendido común es que un diámetro exterior más grande de la rueda magnética del robot significa una tracción más fuerte. Este no es el factor principal. La fuerza de tracción real está determinada principalmente por el ancho de la rueda y el grado de los imanes utilizados en el interior. Una rueda más ancha significa un área de contacto magnético más grande con la superficie metálica, lo que aumenta significativamente la capacidad de carga.
Si está diseñando un vehículo robot y no está seguro de cómo calcular la capacidad de carga requerida para sus ruedas magnéticas, no dude en contactar a nuestro equipo de ventas. Estamos aquí para ayudarle a determinar la mejor solución para su aplicación.