
 English
English Deutsch
Deutsch Русский
Русский Español
Español Français
Français 日本語
日本語
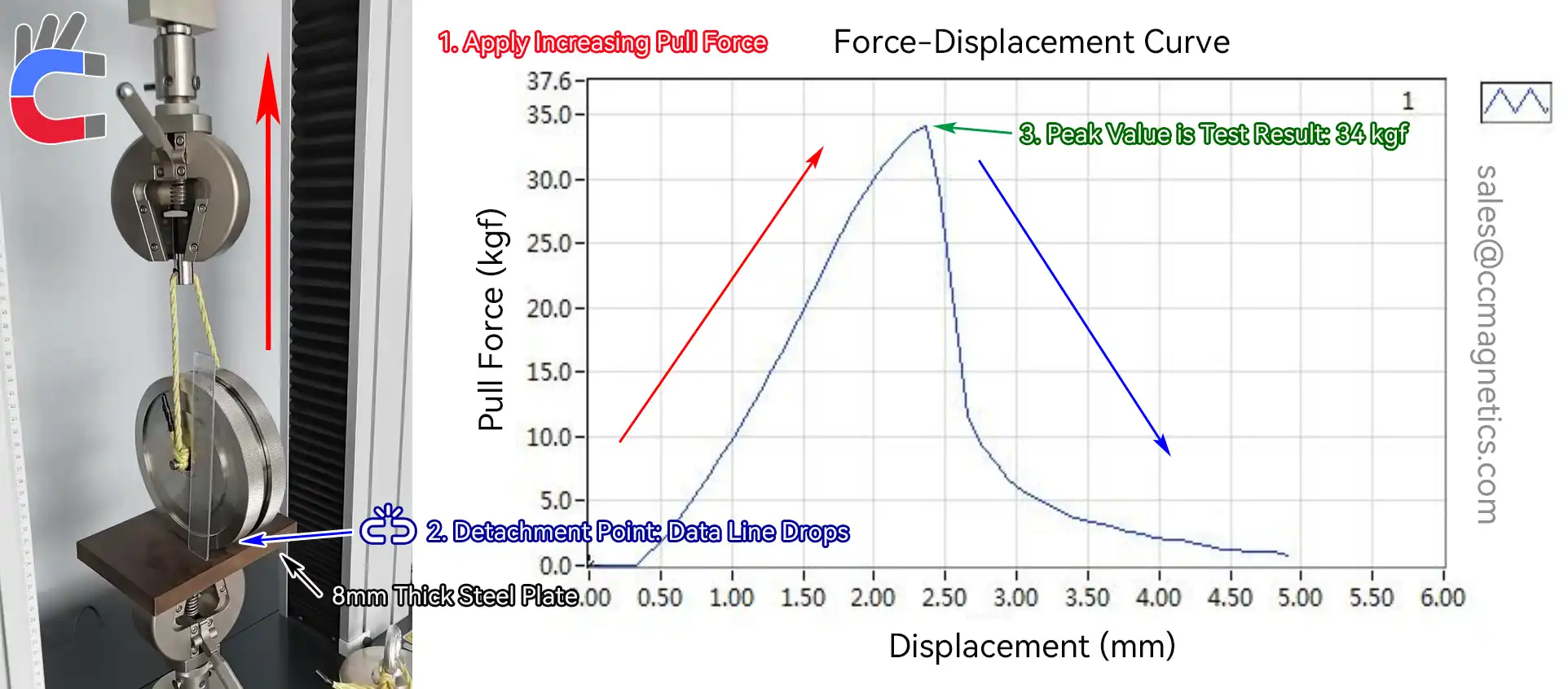
일반적으로 CCmagnetics는 WM 시리즈 로봇 마그네틱 휠을 사용하는 각 고객에게 인장 테스트 보고서(Pull test report)를 제공합니다. 테스트 보고서에는 최대 인장력(흡착력)이 표시됩니다. 예를 들어, 최대 인장력이 34kgf인 마그네틱 휠을 안전율(Safety Factor) 4로 설정하여 4륜 구조에 사용할 경우, 34kg의 무게를 안전하게 지탱할 수 있습니다. 여기서 마그네틱 휠의 하중 용량에는 휠 자체의 무게도 포함된다는 점을 이해하는 것이 중요합니다. 따라서 로봇용 휠을 선택할 때 이 무게를 반드시 고려해야 합니다. 자세한 공식과 계산 방법은 이 글의 뒷부분에서 제공됩니다.
또한, 실제 적용 환경에서의 하중 용량은 여러 요인의 영향을 받습니다. 여기에는 로봇 마그네틱 휠이 작동하는 금속 표면의 경사, 곡률, 두께, 재질뿐만 아니라 이물질의 존재 여부도 포함됩니다. 휠에 타이어가 있는지 여부도 역할을 합니다. 이러한 요인에 대해 확신이 없거나 올바른 휠을 선택하는 데 도움이 필요한 경우, 로봇의 작업 환경과 총 중량에 대한 세부 정보를 저희 직원에게 알려주십시오. 저희 팀이 기꺼이 도와드리겠습니다.
로봇 마그네틱 휠이란 무엇입니까?
로봇 마그네틱 휠은 다양한 복잡한 표면 구조에 적응하도록 설계되었습니다. 내부에는 일반적으로 네오디뮴 영구 자석이 사용되며, 외부에는 스테인리스 스틸 및 고무와 같은 재료가 사용되어 금속 표면에 단단히 부착될 수 있습니다.
이들은 다음과 같은 특정 작업을 수행하는 로봇에 사용되는 필수 구성 요소입니다:
- 선체 청소 로봇
- 조선소용 샌드블라스팅 및 도장 로봇
- 탱크 청소 로봇
- 마그네틱 선체 크롤러
- 선박 청소 로봇
- 수중 선체 청소 로봇
강력한 자력 덕분에 선박의 곡면이나 오일 탱크의 원형 표면에 장기간 부착된 상태를 유지할 수 있습니다. 이들은 선박, 오일 탱크, 파이프라인 및 유사한 금속 구조물의 유지 보수 작업에서 중요한 역할을 합니다.

자기 전송
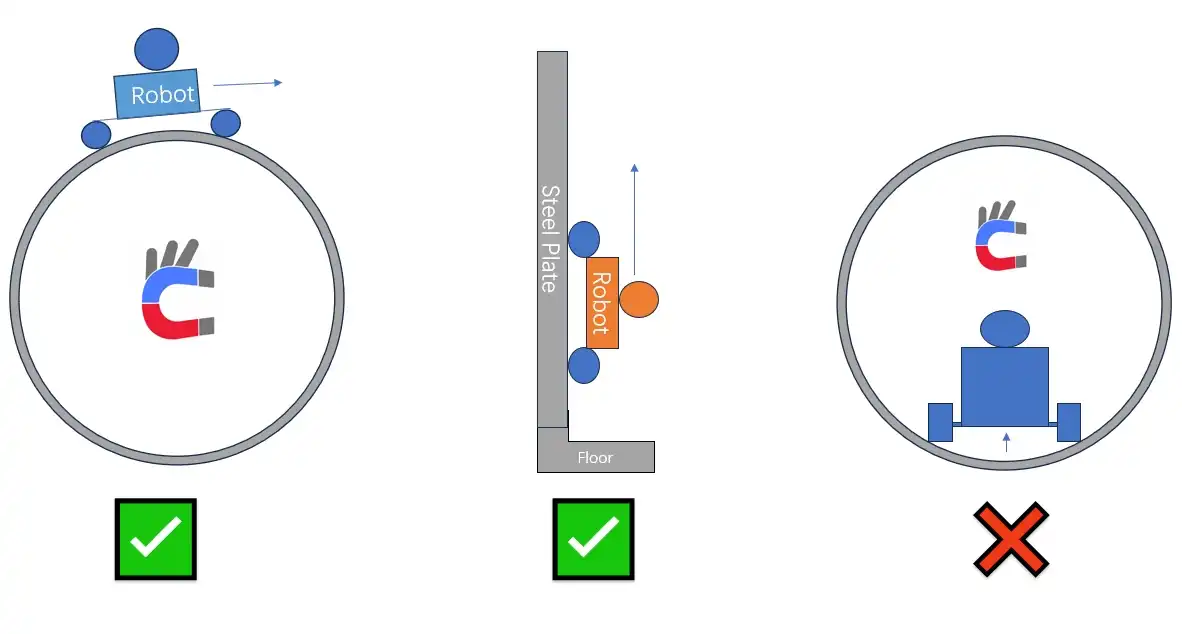
벽면 등반 로봇용 마그네틱 휠을 선택할 때 가장 큰 과제는 수직 하중 용량을 정확하게 계산하는 것입니다. 그러나 마그네틱 휠의 실제 하중 용량을 결정하는 것은 인장 테스트 보고서에만 근거하지 않습니다. 계산 시 로봇의 특정 작업 환경과 금속 표면의 상태(이물질 및 틈새 등)도 고려해야 합니다.
로봇 마그네틱 휠 하중을 계산하는 방법은?
마그네틱 로봇 휠이 수직으로 지탱할 수 있는 무게를 계산하는 것은 안전하고 효과적인 로봇을 설계하는 데 매우 중요합니다. 자세한 내용은 다음과 같습니다:
1. 기본 정의 및 공식
kgf (킬로그램 힘): 이 단위는 힘을 측정합니다. 1kg의 질량에 중력이 가하는 힘으로 생각하면 됩니다. 이 문맥에서 34kgf는 단일 마그네틱 휠이 약 34kg(약 333.2 뉴턴 또는 N)의 무게에 해당하는 최대 수직 유지력을 제공할 수 있음을 의미합니다.
서스펜션(매달리기) 용량 계산:
마그네틱 휠을 사용하여 안전하게 매달 수 있는 최대 무게는 인장력(Pull force)과 안전율(Safety Factor, SF)을 사용하여 계산됩니다.

2. 안전율(SF) 선택
안전율은 변수와 예상치 못한 힘을 고려하여 안전 마진을 구축하는 데 사용되는 배수입니다. SF가 높을수록 안전 마진이 큽니다. 권장 사항은 다음과 같습니다:
| 시나리오 | 권장 안전율 (SF) | 설명 |
|---|---|---|
| 정적 하중 (Static Load) | 2 - 3 | 고정 사용 시. 재료 피로도를 고려합니다. |
| 동적 하중 (Dynamic Load) | 4 - 5 | 이동하는 로봇용. 관성, 진동 등을 고려합니다. |
| 고위험 지역 | ≥6 | 극한 조건(예: 고공 작업)에서도 안전을 보장합니다. |
3. 단일 휠 서스펜션 용량
단일 휠의 안전 용량을 계산해 보겠습니다:
예시: 동적 작업(SF=4 사용)에 사용되는 34kgf 마그네틱 휠.

참고: 이 8.5kg은 로봇 무게 중 휠 하나가 지탱할 수 있는 안전한 부분입니다.
4. 전체 차량 서스펜션 용량
로봇이 여러 개의 휠(예: 4륜 설계)을 사용하는 경우, 총 서스펜션 용량은 각 휠의 안전 용량의 합입니다.

여기서 n은 휠의 개수입니다.
예시: 동적 작업(SF=4)을 위해 4개의 34kgf 휠을 사용하는 4륜 로봇.

5. 실제 환경 조정
위의 계산은 기준을 제공합니다. 실제로는 작업 환경에 따라 조정해야 합니다:
(1) 경사면에서의 작동
경사면(예: 선체)을 오를 때 중력이 로봇을 아래로 당겨 수직 지지에 사용할 수 있는 유효 자력이 감소합니다.
각도 θ의 경사면에서 유효 유지력은 각도의 코사인만큼 감소합니다.

예시: 30° 경사면에서 총 자력이 136kgf(4개 휠)이고 SF=4인 경우.

(2) 충격 하중 (급정지/급출발)
로봇이 급정지하거나 가속해야 하는 경우, 관성으로 인해 마그네틱 그립이 견뎌야 하는 추가적인 힘(충격 하중)이 발생합니다. 이는 실질적으로 부하를 증가시킵니다.

여기서:
- a는 가속도/감속도입니다.
- g는 중력 가속도(약 9.8 m/s²)입니다.
예시: 가속도 a=3m/s²를 겪는 34kg의 정적 무게를 가진 로봇.

6. 엔지니어링 권장 사항
-
하중 매칭:
34kg 무게의 로봇을 안전하게 매달기 위해:
- 동적 시나리오의 경우:
총 서스펜션 무게계산과 일치하는 최소 용량이 필요합니다(예: SF=4인 34kgf 휠 4개). - 정적 시나리오의 경우: 더 적게 필요할 수 있지만(예: SF=2인 34kgf 휠 2개), 안전을 고려하십시오.
- 동적 시나리오의 경우:
-
중복성(Redundancy): 일반적으로 총 가용 자력이 목표 무게의 최소 5배가 되도록 권장합니다. 이는 예상치 못한 힘이나 표면 문제에 대해 상당한 완충 작용을 제공합니다.
-
현장 테스트: 항상 인장력 게이지를 사용하여 목표 표면에서 실제 유지력을 확인하십시오. 실험실 데이터는 때때로 실제 조건에서의 성능을 과대평가할 수 있습니다.
7. 빠른 참조 표
다음은 빠른 추정을 위한 34kgf 휠 기준의 간단한 표입니다:
| 단일 휠 자력 (kgf) | 안전율 (SF) | 단일 휠 안전 용량 (kg) | 4륜 시스템 총 용량 (kg) |
|---|---|---|---|
| 34 | 2 | 17 | 68 |
| 34 | 4 | 8.5 | 34 |
| 34 | 6 | ≈5.7 | ≈22.8 |
로봇 마그네틱 휠 성능과 안전율에 영향을 미치는 요인
인장 테스트는 기준을 제공하지만, 여러 실제 요인이 실제 자력과 사용해야 할 안전율에 영향을 미칩니다:
-
금속 표면 특성:
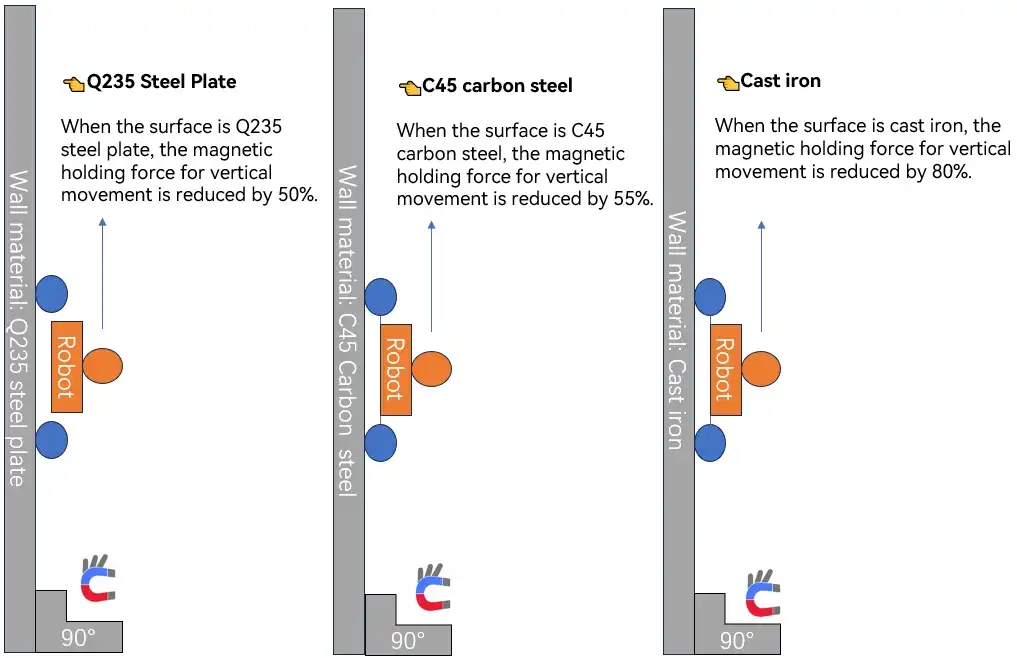
- 두께 및 등급: 일반적으로 금속 표면은 마그네틱 휠이 잠재적인 최대 인장력을 발휘하려면 5mm보다 두꺼워야 합니다. 그러나 금속의 특정 유형 또는 '등급'도 중요합니다. 다양한 강철 등급(예: Q235 강철 대 기타)과 같은 다른 금속 합금은 서로 다른 부착력을 초래합니다.
-
휠과 표면 사이의 틈새(Gap):
- 마그네틱 휠과 금속 표면 사이의 틈새(종종 휠 타이어, 녹, 페인트 또는 이물질로 인해 발생)는 자력을 감소시킵니다.
- 틈새가 클수록 흡착력이 약해집니다.
- CCmagnetics는 수많은 고객 프로젝트 데이터를 바탕으로 틈새가 마그네틱 휠 흡착력에 미치는 영향에 대한 광범위한 경험과 데이터를 보유하고 있습니다. 저희는 고객을 돕기 위해 이 지식을 공개적으로 공유합니다.

로봇 마그네틱 휠 타이어
기타 마그네틱 휠 선정 팁
- 직경보다 폭(Width)이 더 중요합니다: 흔한 오해 중 하나는 로봇 마그네틱 휠의 외경이 클수록 인장력이 강하다는 것입니다. 이것은 주요 요인이 아닙니다. 실제 인장력은 주로 휠의 폭과 내부에 사용된 자석 등급에 의해 결정됩니다. 휠이 넓을수록 금속 표면과의 자기 접촉 면적이 넓어져 하중 용량이 크게 증가합니다.
로봇 차량을 설계 중이며 마그네틱 휠에 필요한 하중 용량을 계산하는 방법에 대해 확신이 서지 않는 경우, 언제든지 저희 영업 팀에 문의해 주십시오. 귀하의 애플리케이션에 가장 적합한 솔루션을 결정하도록 도와드리겠습니다.