
 English
English Deutsch
Deutsch Русский
Русский Español
Español 한국어
한국어 日本語
日本語
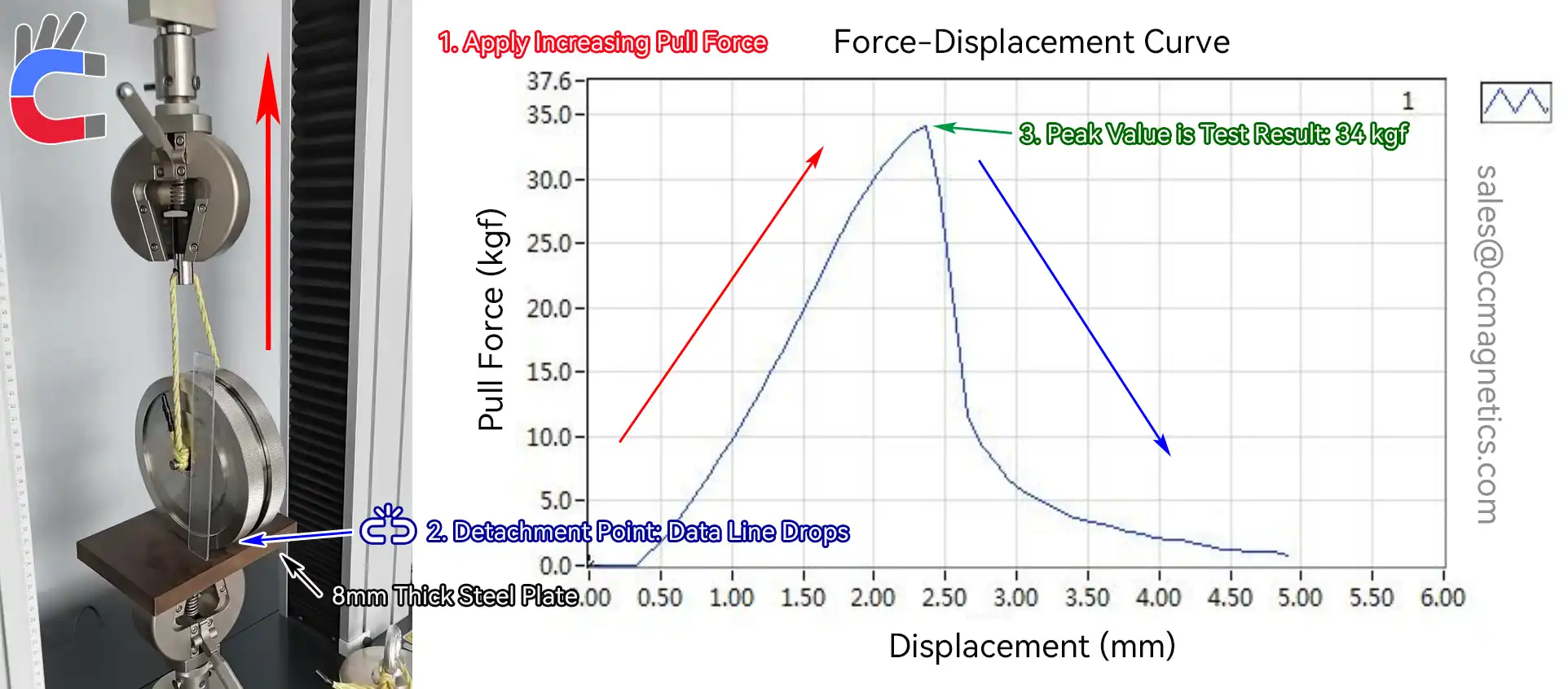
En général, CCmagnetics fournit un rapport de test de traction pour chaque client utilisant notre série de roues magnétiques pour robots WM. Le rapport de test indique la force de traction maximale. Par exemple, une roue magnétique avec une force de traction maximale de 34 kgf, lorsqu'elle est utilisée dans une configuration à quatre roues avec un facteur de sécurité de 4, peut suspendre en toute sécurité 34 kg de poids. Il est crucial de comprendre que la capacité de charge de la roue magnétique inclut le poids de la roue elle-même. Par conséquent, vous devez tenir compte de ce poids lors de la sélection des roues pour votre robot. Des formules détaillées et des méthodes de calcul sont fournies plus loin dans cet article.
De plus, la capacité de charge réelle dans les applications concrètes est affectée par plusieurs facteurs. Ceux-ci incluent la pente, la courbure, l'épaisseur et le matériau de la surface métallique sur laquelle la roue magnétique du robot opère, ainsi que la présence de tout corps étranger. Le fait que la roue soit équipée de pneus joue également un rôle. Si vous avez des doutes sur ces facteurs ou si vous avez besoin d'aide pour sélectionner la bonne roue, veuillez fournir à notre personnel des détails sur l'environnement de travail de votre robot et son poids total. Notre équipe se fera un plaisir de vous aider.
Qu'est-ce que les roues magnétiques pour robots ?
Les roues magnétiques pour robots sont conçues pour s'adapter à diverses structures de surface complexes. À l'intérieur, elles sont généralement fabriquées avec des aimants permanents en néodyme, tandis que l'extérieur utilise des matériaux comme l'acier inoxydable et le caoutchouc, leur permettant d'adhérer fermement aux surfaces métalliques.
Ce sont des composants essentiels utilisés dans les robots pour des tâches spécifiques, telles que :
- Robots de nettoyage de coque de navire
- Robots de sablage et de peinture pour les chantiers navals
- Robots de nettoyage de réservoirs
- Chenillards magnétiques pour coques
- Robots de nettoyage de navires
- Robots de nettoyage de coque sous-marins
Leur forte force magnétique leur permet de rester fixées pendant de longues périodes sur les surfaces courbes des navires et les surfaces rondes des réservoirs pétroliers. Elles jouent un rôle vital dans les travaux de maintenance sur les navires, les réservoirs pétroliers, les pipelines et les structures métalliques similaires.

Transmission magnétique
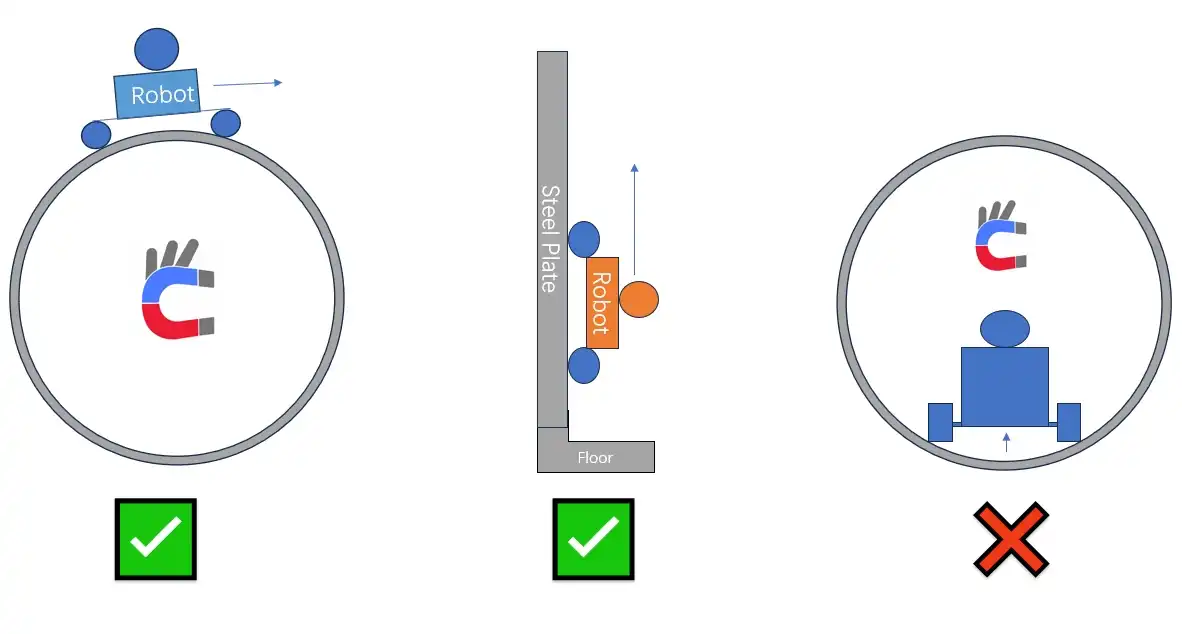
Un défi clé lors de la sélection des roues magnétiques pour les robots grimpeurs de murs est de calculer avec précision leur capacité de charge verticale. Cependant, déterminer la capacité de charge réelle des roues magnétiques ne se base pas uniquement sur le rapport de test de traction. Vous devez également tenir compte de l'environnement de travail spécifique du robot et de l'état (comme les corps étrangers et les espaces) de la surface métallique lors du calcul.
Comment calculer la charge de la roue magnétique du robot ?
Calculer le poids qu'une roue de robot magnétique peut supporter verticalement est crucial pour concevoir des robots sûrs et efficaces. Voici une explication détaillée :
1. Définition de base et formule
kgf (Kilogramme-force) : Cette unité mesure la force. Considérez-la comme la force exercée par la gravité sur une masse de 1 kilogramme. Dans notre contexte, 34 kgf signifie qu'une seule roue magnétique peut fournir une force de maintien verticale maximale équivalente au poids d'environ 34 kg (ce qui correspond à environ 333,2 Newtons ou N).
Calcul de la capacité de suspension :
Le poids maximum que vous pouvez suspendre en toute sécurité à l'aide d'une roue magnétique est calculé en utilisant sa force de traction et un Facteur de Sécurité (SF).

2. Choisir le Facteur de Sécurité (SF)
Le Facteur de Sécurité est un multiplicateur utilisé pour intégrer une marge de sécurité, tenant compte des variations et des forces inattendues. Un SF plus élevé signifie une marge de sécurité plus grande. Voici quelques recommandations :
| Scénario | Facteur de Sécurité (SF) recommandé | Explication |
|---|---|---|
| Charge statique | 2 - 3 | Pour une utilisation stationnaire. Tient compte de la fatigue des matériaux. |
| Charge dynamique | 4 - 5 | Pour les robots en mouvement. Prend en compte l'inertie, les vibrations, etc. |
| Zones à haut risque | ≥6 | Garantit la sécurité même dans des conditions extrêmes (ex. travaux en haute altitude). |
3. Capacité de suspension d'une seule roue
Calculons la capacité sûre pour une seule roue :
Exemple : Une roue magnétique de 34 kgf utilisée dans une opération dynamique (avec SF=4).

Remarque : Ces 8,5 kg représentent la partie du poids sûr du robot qu'une roue peut supporter.
4. Capacité de suspension totale du véhicule
Si votre robot utilise plusieurs roues (comme une conception à quatre roues), la capacité de suspension totale est la somme de la capacité sûre de chaque roue.

Où n est le nombre de roues.
Exemple : Un robot à quatre roues utilisant quatre roues de 34 kgf pour des tâches dynamiques (SF=4).

5. Ajustements en conditions réelles
Les calculs ci-dessus fournissent une base de référence. En pratique, vous devez ajuster en fonction de l'environnement de travail réel :
(1) Fonctionnement sur des surfaces inclinées
Lors de la montée de pentes (comme sur une coque de navire), la gravité tire le robot vers le bas, réduisant la force magnétique efficace disponible pour le support vertical.
Sur une pente avec un angle θ, la force de maintien efficace est réduite par le cosinus de l'angle.

Exemple : Sur une pente de 30°, avec une force magnétique totale de 136 kgf (provenant de 4 roues) et SF=4.

(2) Charges d'impact (Arrêts/Démarrages soudains)
Si votre robot doit s'arrêter ou accélérer rapidement, l'inertie crée des forces supplémentaires (charges d'impact) que l'adhérence magnétique doit supporter. Cela augmente effectivement la charge.

Où :
- a est l'accélération/décélération.
- g est l'accélération due à la gravité (env. 9,8 m/s²).
Exemple : Un poids statique de robot de 34 kg subissant une accélération de a=3m/s².

6. Recommandations d'ingénierie
-
Correspondance de charge :
Pour suspendre en toute sécurité un robot pesant 34 kg :
- Pour les scénarios dynamiques : Vous auriez besoin d'au moins une capacité totale correspondant au calcul du
Poids suspendu total(ex. 4 roues @ 34 kgf avec SF=4). - Pour les scénarios statiques : Vous pourriez avoir besoin de moins (ex. 2 roues @ 34 kgf avec SF=2), mais pensez à la sécurité.
- Pour les scénarios dynamiques : Vous auriez besoin d'au moins une capacité totale correspondant au calcul du
-
Redondance : Il est souvent recommandé que la force magnétique totale disponible soit d'au moins 5 fois le poids cible. Cela fournit une marge importante pour les forces inattendues ou les problèmes de surface.
-
Tests sur le terrain : Vérifiez toujours la force de maintien réelle à l'aide d'un dynamomètre sur la surface cible. Les données de laboratoire peuvent parfois surestimer les performances dans des conditions réelles.
7. Tableau de référence rapide
Voici un tableau simple basé sur une roue de 34 kgf pour des estimations rapides :
| Force magnétique d'une seule roue (kgf) | Facteur de Sécurité (SF) | Capacité sûre d'une seule roue (kg) | Capacité totale du système à quatre roues (kg) |
|---|---|---|---|
| 34 | 2 | 17 | 68 |
| 34 | 4 | 8,5 | 34 |
| 34 | 6 | ≈5,7 | ≈22,8 |
Facteurs affectant la performance de la roue magnétique du robot et votre facteur de sécurité
Bien que le test de traction fournisse une base de référence, plusieurs facteurs du monde réel influencent la force magnétique réelle et le Facteur de Sécurité que vous devez utiliser :
-
Propriétés de la surface métallique :
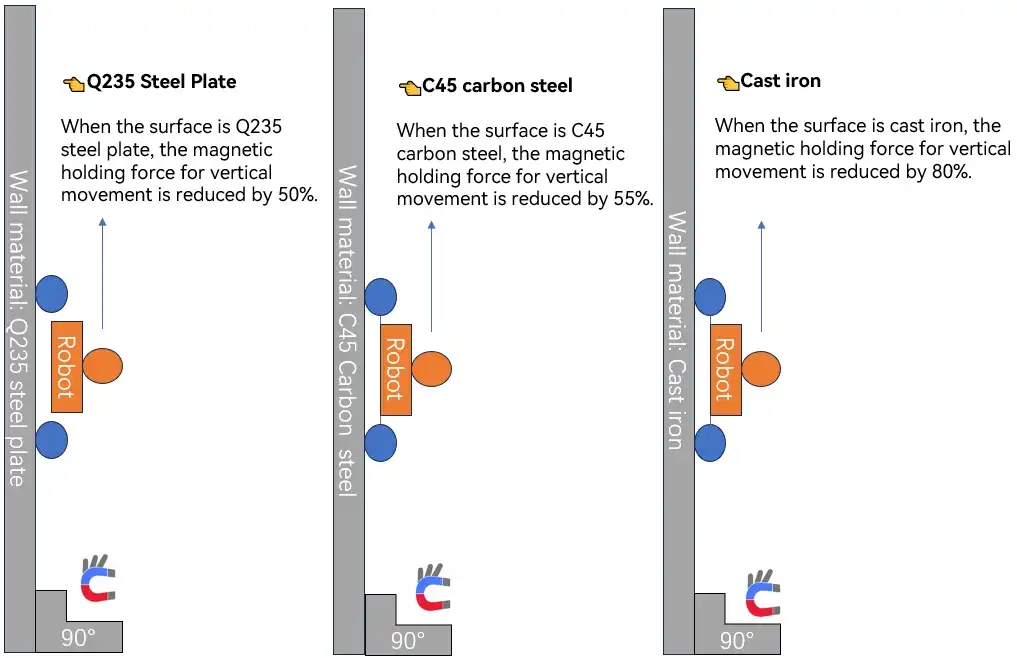
- Épaisseur et nuance : En général, la surface métallique doit être plus épaisse que 5 mm pour que la roue magnétique atteigne son plein potentiel de force de traction. Cependant, le type ou la 'nuance' spécifique du métal compte également de manière significative. Différents alliages métalliques, comme diverses nuances d'acier (ex. acier Q235 vs autres), entraîneront des forces d'adhérence différentes.
-
Espace (Jeu) entre la roue et la surface :
- Tout espace entre la roue magnétique et la surface métallique, souvent causé par le pneu de la roue, la rouille, la peinture ou des débris, réduira l'attraction magnétique.
- Plus l'espace est grand, plus l'attraction est faible.
- Chez CCmagnetics, nous avons une vaste expérience et des données sur la façon dont les espaces affectent l'attraction des roues magnétiques, soutenues par des données de nombreux projets clients. Nous partageons ouvertement ces connaissances pour aider nos clients.

Pneu pour roue magnétique de robot
Autres conseils pour la sélection des roues magnétiques
- La largeur compte plus que le diamètre : Une idée fausse courante est qu'un diamètre extérieur plus grand de la roue magnétique du robot signifie une traction plus forte. Ce n'est pas le facteur principal. La force de traction réelle est principalement déterminée par la largeur de la roue et la qualité des aimants utilisés à l'intérieur. Une roue plus large signifie une zone de contact magnétique plus grande avec la surface métallique, ce qui augmente considérablement la capacité de charge.
Si vous concevez un véhicule robotisé et que vous n'êtes pas sûr de la manière de calculer la capacité de charge requise pour vos roues magnétiques, n'hésitez pas à contacter notre équipe commerciale. Nous sommes là pour vous aider à déterminer la meilleure solution pour votre application.