
 English
English Deutsch
Deutsch Русский
Русский Español
Español Français
Français 한국어
한국어
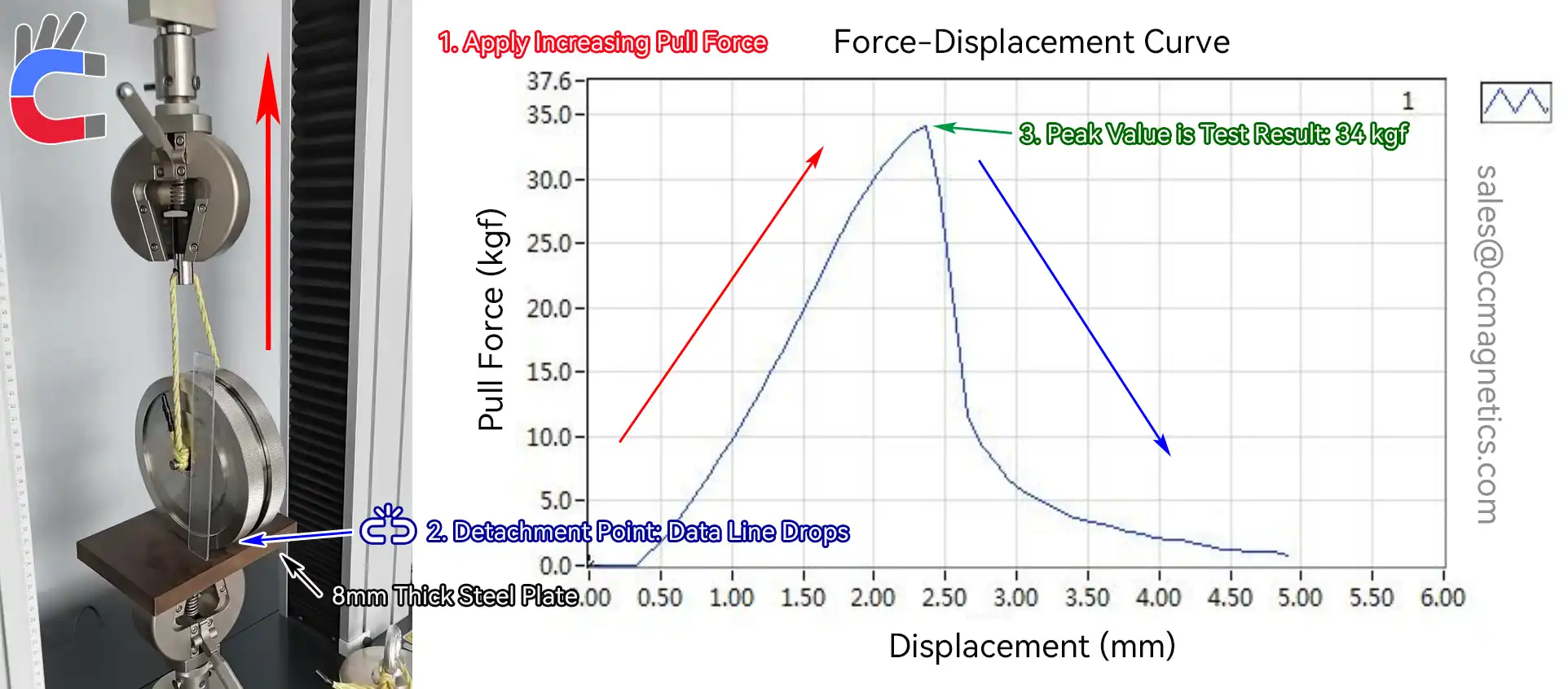
通常、CCmagneticsはWMシリーズのロボット用マグネットホイールを使用する各お客様に引張試験報告書(Pull test report)を提供しています。試験報告書には最大引張力(吸着力)が示されています。例えば、最大引張力が34kgfのマグネットホイールを、安全率(Safety Factor)4で4輪構成で使用する場合、34kgの重量を安全に吊り下げることができます。ここで重要なのは、マグネットホイールの耐荷重(負荷容量)にはホイール自体の重量も含まれるという点です。したがって、ロボット用のホイールを選定する際には、この重量を考慮する必要があります。詳細な公式と計算方法は、この記事の後半で紹介します。
さらに、実環境での実際の耐荷重はいくつかの要因に影響されます。これには、ロボット用マグネットホイールが動作する金属表面の傾斜、曲率、厚さ、材質、および異物の有無が含まれます。ホイールにタイヤが付いているかどうかも役割を果たします。これらの要因について不確実な場合や、適切なホイールの選定に助けが必要な場合は、ロボットの作業環境と総重量に関する詳細をスタッフにお知らせください。私たちのチームが喜んでお手伝いいたします。
ロボット用マグネットホイールとは?
ロボット用マグネットホイールは、さまざまな複雑な表面構造に適応するように設計されています。内部は通常、ネオジム永久磁石で作られており、外部にはステンレス鋼やゴムなどの材料が使用されているため、金属表面にしっかりと吸着できます。
これらは、次のような特定のタスクを行うロボットで使用される不可欠なコンポーネントです:
- 船体清掃ロボット
- 造船所向けサンドブラストおよび塗装ロボット
- タンク清掃ロボット
- 磁気ハルクローラー(船体走行車)
- 船舶清掃ロボット
- 水中船体清掃ロボット
強力な磁力により、船の曲面や石油タンクの円形表面に長時間付着したまま留まることができます。これらは、船舶、石油タンク、パイプライン、および同様の金属構造物のメンテナンス作業において重要な役割を果たします。

磁気伝送
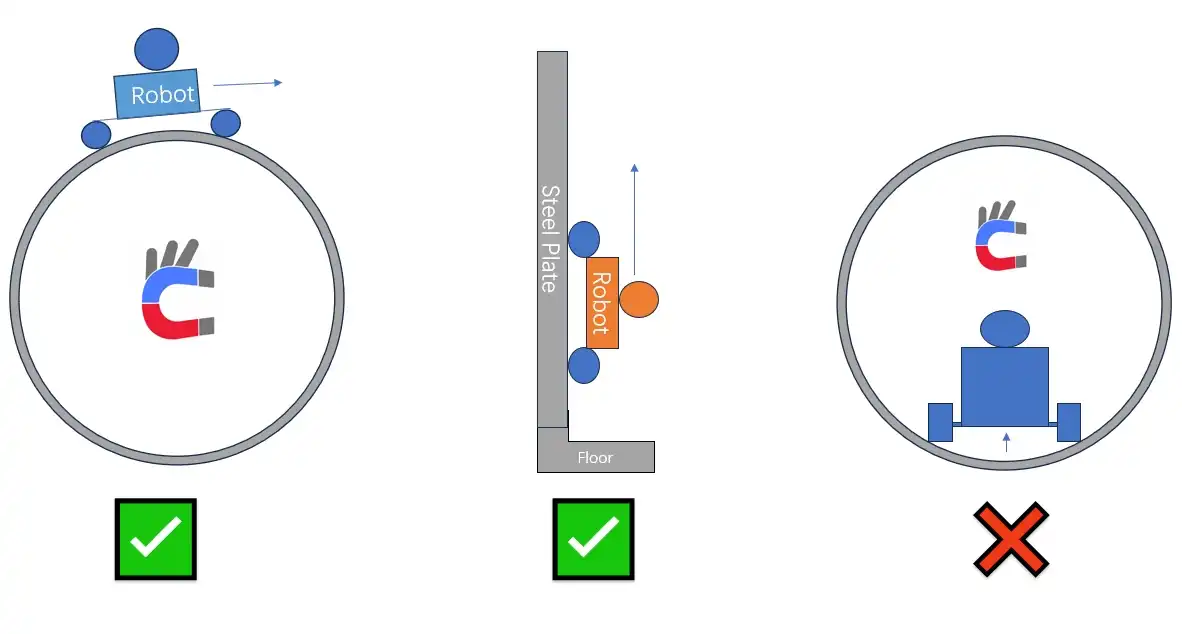
壁面走行ロボット用のマグネットホイールを選定する際の主な課題は、その垂直耐荷重を正確に計算することです。しかし、マグネットホイールの実際の耐荷重を決定することは、引張試験報告書だけに基づくものではありません。計算時には、ロボットの特定の作業環境や金属表面の状態(異物や隙間など)も考慮する必要があります。
ロボット用マグネットホイールの耐荷重を計算する方法は?
マグネットロボットホイールが垂直にどれだけの重量を保持できるかを計算することは、安全で効果的なロボットを設計するために不可欠です。以下に内訳を示します:
1. 基本定義と公式
kgf(重量キログラム): これは力の単位です。1キログラムの質量に重力が及ぼす力と考えてください。この文脈では、34 kgfは、単一のマグネットホイールが約34 kg(約333.2ニュートンまたはN)の重量に相当する最大垂直保持力を提供できることを意味します。
吊り下げ容量の計算:
マグネットホイールを使用して安全に吊り下げることができる最大重量は、その引張力と安全率(SF)を使用して計算されます。

2. 安全率(SF)の選択
安全率は、変動や予期しない力を考慮して安全マージンを構築するために使用される係数です。SFが高いほど、安全マージンが大きくなります。推奨事項は次のとおりです:
| シナリオ | 推奨安全率(SF) | 説明 |
|---|---|---|
| 静荷重 (Static Load) | 2 - 3 | 静止使用用。材料疲労を考慮します。 |
| 動荷重 (Dynamic Load) | 4 - 5 | 移動ロボット用。慣性、振動などを考慮します。 |
| 高リスクエリア | ≥6 | 極端な条件(例:高所作業)でも安全を確保します。 |
3. 単輪の吊り下げ容量
単一ホイールの安全容量を計算してみましょう:
例: 動的動作(SF=4を使用)で使用される34 kgfのマグネットホイール。

注: この8.5 kgは、1つのホイールがサポートできるロボットの安全な重量部分です。
4. 車両全体の吊り下げ容量
ロボットが複数のホイール(例:4輪設計)を使用する場合、総吊り下げ容量は各ホイールの安全容量の合計です。

ここで、nはホイールの数です。
例: 動的タスク(SF=4)のために4つの34 kgfホイールを使用する4輪ロボット。

5. 実環境での調整
上記の計算は基準を提供します。実際には、実際の作業環境に基づいて調整する必要があります:
(1) 斜面での動作
斜面(船体など)を登るとき、重力がロボットを下に引っ張り、垂直支持に使用できる有効磁力を減少させます。
角度θの斜面では、有効保持力は角度のコサイン分だけ減少します。

例: 30°の斜面で、総磁力が136 kgf(4輪から)、SF=4の場合。

(2) 衝撃荷重(急停止/急発進)
ロボットが急停止または加速する必要がある場合、慣性によって磁気グリップが耐えなければならない追加の力(衝撃荷重)が発生します。これにより、実質的に負荷が増加します。

ここで:
- aは加速度/減速度です。
- gは重力加速度(約9.8 m/s²)です。
例: 加速度a=3m/s²を受ける静的重量34 kgのロボット。

6. エンジニアリング上の推奨事項
-
負荷マッチング:
34 kgのロボットを安全に吊り下げるために:
- 動的シナリオの場合:
総吊り下げ重量の計算と一致する少なくとも合計容量が必要です(例:SF=4で34 kgfホイール4つ)。 - 静的シナリオの場合:より少なくても済む場合がありますが(例:SF=2で34 kgfホイール2つ)、安全を考慮してください。
- 動的シナリオの場合:
-
冗長性: 一般的に、利用可能な総磁力が目標重量の少なくとも5倍になるように推奨されます。これにより、予期しない力や表面の問題に対して十分なバッファーが提供されます。
-
フィールドテスト: 常にターゲット表面でプルフォースゲージを使用して実際の保持力を確認してください。実験室のデータは、実際の条件下での性能を過大評価することがあります。
7. クイックリファレンス表
以下は、迅速な見積もりのための34 kgfホイールに基づく簡単な表です:
| 単輪磁力 (kgf) | 安全率 (SF) | 単輪安全容量 (kg) | 4輪システム総容量 (kg) |
|---|---|---|---|
| 34 | 2 | 17 | 68 |
| 34 | 4 | 8.5 | 34 |
| 34 | 6 | ≈5.7 | ≈22.8 |
ロボット用マグネットホイールの性能と安全率に影響を与える要因
引張試験は基準を提供しますが、いくつかの実際の要因が実際の磁力と使用すべき安全率に影響を与えます:
-
金属表面の特性:
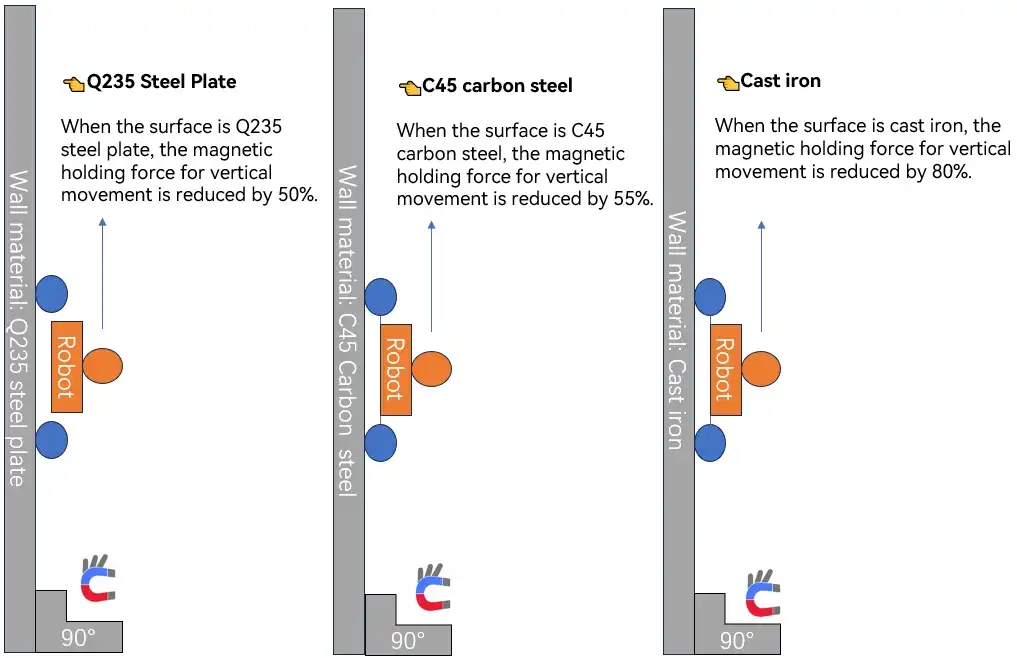
- 厚さとグレード: 一般的に、金属表面はマグネットホイールが潜在的な最大引張力を発揮するために5mmよりも厚くあるべきです。しかし、金属の特定のタイプまたは「グレード」も重要です。異なる金属合金、例えばさまざまな鋼材グレード(例:Q235鋼対その他)は、異なる付着力をもたらします。
-
ホイールと表面の間の隙間(ギャップ):
- マグネットホイールと金属表面の間の隙間(多くの場合、ホイールのタイヤ、錆、塗料、または破片によって引き起こされる)は、磁気吸引力を減少させます。
- 隙間が大きいほど、吸引力は弱くなります。
- CCmagneticsでは、隙間がマグネットホイールの吸引力にどのように影響するかについての広範な経験とデータを持っており、これは多数の顧客プロジェクトのデータに裏打ちされています。私たちは顧客を支援するためにこの知識を公開しています。

ロボット用マグネットホイールタイヤ
その他のマグネットホイール選定のヒント
- 直径よりも幅(Width)が重要: よくある誤解は、ロボット用マグネットホイールの外径が大きいほど引張力が強いということです。これは主要な要因ではありません。実際の引張力は、主にホイールの幅と内部で使用される磁石のグレードによって決まります。ホイールの幅が広いほど、金属表面との磁気接触面積が大きくなり、耐荷重が大幅に増加します。
ロボット車両を設計中で、マグネットホイールに必要な耐荷重を計算する方法について確信が持てない場合は、お気軽に営業チームにお問い合わせください。お客様のアプリケーションに最適なソリューションを決定するお手伝いをいたします。