
 English
English Deutsch
Deutsch Español
Español Français
Français 한국어
한국어 日本語
日本語
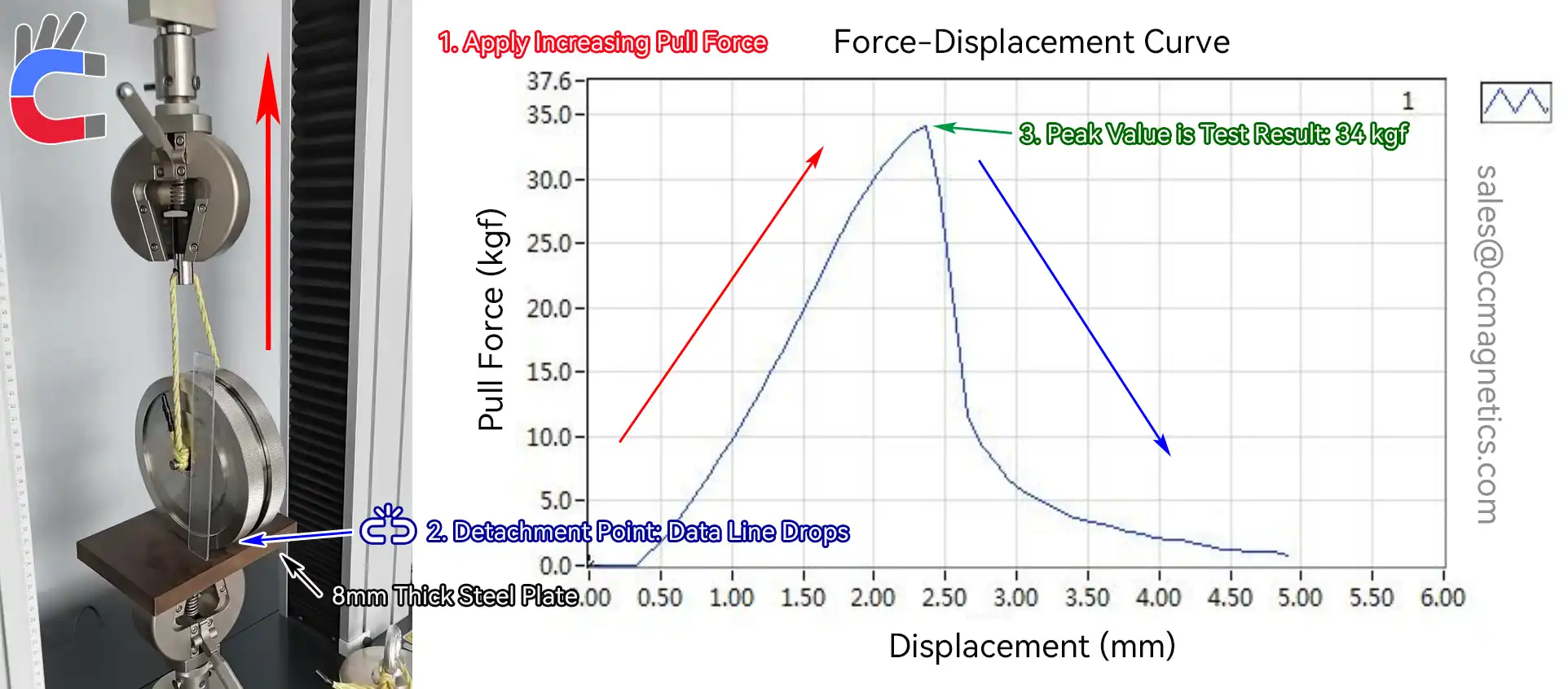
Как правило, компания CCmagnetics предоставляет отчет об испытаниях на отрыв для каждого клиента, использующего наши магнитные колеса для роботов серии WM. В отчете указывается максимальная сила отрыва. Например, магнитное колесо с максимальной силой отрыва 34 кгс при использовании в четырехколесной конфигурации с коэффициентом запаса прочности 4 может безопасно удерживать вес 34 кг. Важно понимать, что грузоподъемность магнитного колеса включает вес самого колеса. Поэтому необходимо учитывать этот вес при выборе колес для вашего робота. Подробные формулы и методы расчета приведены далее в этой статье.
Кроме того, на фактическую грузоподъемность в реальных условиях влияет несколько факторов. К ним относятся уклон, кривизна, толщина и материал металлической поверхности, по которой движется магнитное колесо робота, а также наличие посторонних предметов. Наличие шин на колесе также играет роль. Если вы не уверены в этих факторах или вам нужна помощь в выборе подходящего колеса, пожалуйста, предоставьте нашим сотрудникам подробную информацию о рабочей среде вашего робота и его общем весе. Наша команда будет рада помочь вам.
Что такое магнитные колеса для роботов?
Магнитные колеса для роботов разработаны для адаптации к различным сложным структурам поверхности. Внутри они обычно содержат неодимовые постоянные магниты, а снаружи используются такие материалы, как нержавеющая сталь и резина, что позволяет им прочно прилипать к металлическим поверхностям.
Они являются важными компонентами, используемыми в роботах для выполнения специфических задач, таких как:
- Роботы для очистки корпусов судов
- Роботы для пескоструйной обработки и покраски на верфях
- Роботы для очистки резервуаров
- Магнитные гусеничные роботы для корпусов
- Роботы для очистки судов
- Роботы для подводной очистки корпусов
Их сильная магнитная сила позволяет им длительное время удерживаться на изогнутых поверхностях кораблей и круглых поверхностях нефтяных резервуаров. Они играют жизненно важную роль в работах по техническому обслуживанию судов, нефтяных резервуаров, трубопроводов и подобных металлических конструкций.

Магнитная передача
Ключевой задачей при выборе магнитных колес для настенных роботов является точный расчет их вертикальной грузоподъемности. Однако определение реальной грузоподъемности магнитных колес основывается не только на отчете об испытаниях на отрыв. При расчете необходимо также учитывать специфическую рабочую среду робота и состояние (например, посторонние предметы и зазоры) металлической поверхности.
Как рассчитать нагрузку на магнитное колесо робота?
Расчет того, какой вес может вертикально удерживать магнитное колесо робота, имеет решающее значение для проектирования безопасных и эффективных роботов. Вот подробный разбор:
1. Основные определения и формула
кгс (килограмм-сила): Эта единица измеряет силу. Представьте ее как силу воздействия гравитации на массу в 1 килограмм. В нашем контексте 34 кгс означает, что одно магнитное колесо может обеспечить максимальную вертикальную удерживающую силу, эквивалентную весу около 34 кг (что составляет примерно 333,2 Ньютона или Н).
Расчет грузоподъемности (удерживающей способности):
Максимальный вес, который можно безопасно удерживать с помощью магнитного колеса, рассчитывается с использованием его силы отрыва и коэффициента запаса прочности (SF).

2. Выбор коэффициента запаса прочности (SF)
Коэффициент запаса прочности — это множитель, используемый для создания запаса надежности с учетом вариаций и неожиданных сил. Более высокий SF означает больший запас прочности. Вот некоторые рекомендации:
| Сценарий | Рекомендуемый коэффициент запаса (SF) | Пояснение |
|---|---|---|
| Статическая нагрузка | 2 - 3 | Для стационарного использования. Учитывает усталость материала. |
| Динамическая нагрузка | 4 - 5 | Для движущихся роботов. Учитывает инерцию, вибрацию и т.д. |
| Зоны повышенного риска | ≥6 | Обеспечивает безопасность даже в экстремальных условиях (например, высотные работы). |
3. Грузоподъемность одного колеса
Давайте рассчитаем безопасную грузоподъемность для одного колеса:
Пример: Магнитное колесо 34 кгс, используемое в динамическом режиме (с SF=4).

Примечание: Эти 8,5 кг — это безопасная часть веса робота, которую может выдержать одно колесо.
4. Общая грузоподъемность робота
Если ваш робот использует несколько колес (например, четырехколесная конструкция), общая грузоподъемность представляет собой сумму безопасной грузоподъемности каждого колеса.

Где n — количество колес.
Пример: Четырехколесный робот, использующий четыре колеса по 34 кгс для динамических задач (SF=4).

5. Поправки на реальные условия
Приведенные выше расчеты дают базовые значения. На практике необходимо вносить коррективы с учетом реальной рабочей среды:
(1) Работа на наклонных поверхностях
При подъеме по склонам (например, на корпусе корабля) гравитация тянет робота вниз, уменьшая эффективную магнитную силу, доступную для вертикальной поддержки.
На склоне с углом θ эффективная удерживающая сила уменьшается на косинус угла.

Пример: На склоне 30° с общей магнитной силой 136 кгс (от 4 колес) и SF=4.

(2) Ударные нагрузки (Внезапные остановки/старты)
Если вашему роботу необходимо быстро остановиться или ускориться, инерция создает дополнительные силы (ударные нагрузки), которые должен выдерживать магнитный захват. Это фактически увеличивает нагрузку.

Где:
- a — ускорение/замедление.
- g — ускорение свободного падения (прибл. 9,8 м/с²).
Пример: Робот со статическим весом 34 кг испытывает ускорение a=3 м/с².

6. Инженерные рекомендации
-
Согласование нагрузки:
Чтобы безопасно удерживать робота весом 34 кг:
- Для динамических сценариев: Вам потребуется как минимум общая грузоподъемность, соответствующая расчету
Total Suspended Weight(например, 4 колеса по 34 кгс с SF=4). - Для статических сценариев: Вам может потребоваться меньше (например, 2 колеса по 34 кгс с SF=2), но учитывайте безопасность.
- Для динамических сценариев: Вам потребуется как минимум общая грузоподъемность, соответствующая расчету
-
Избыточность: Часто рекомендуется, чтобы общая доступная магнитная сила составляла не менее 5 раз от целевого веса. Это обеспечивает значительный буфер для непредвиденных сил или проблем с поверхностью.
-
Полевые испытания: Всегда проверяйте фактическую удерживающую силу с помощью измерителя силы отрыва на целевой поверхности. Лабораторные данные иногда могут переоценивать производительность в реальных условиях.
7. Справочная таблица
Вот простая таблица на основе колеса 34 кгс для быстрой оценки:
| Магнитная сила одного колеса (кгс) | Коэффициент запаса (SF) | Безопасная грузоподъемность одного колеса (кг) | Общая грузоподъемность четырехколесной системы (кг) |
|---|---|---|---|
| 34 | 2 | 17 | 68 |
| 34 | 4 | 8,5 | 34 |
| 34 | 6 | ≈5,7 | ≈22,8 |
Факторы, влияющие на производительность магнитного колеса робота и ваш коэффициент запаса прочности
Хотя испытание на отрыв дает базовые значения, несколько реальных факторов влияют на фактическую магнитную силу и коэффициент запаса прочности, который вам следует использовать:
-
Свойства металлической поверхности:
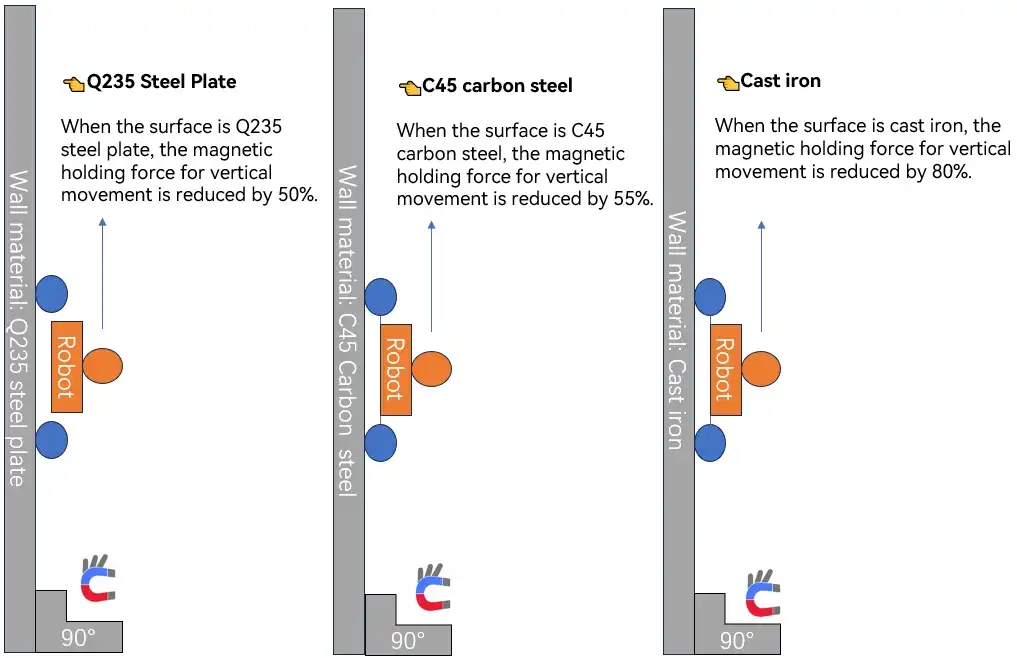
- Толщина и марка: Как правило, металлическая поверхность должна быть толще 5 мм, чтобы магнитное колесо могло достичь своей полной потенциальной силы отрыва. Однако конкретный тип или «марка» металла также имеет большое значение. Различные металлические сплавы, такие как разные марки стали (например, сталь Q235 по сравнению с другими), будут давать различную силу сцепления.
-
Зазор между колесом и поверхностью:
- Любой зазор между магнитным колесом и металлической поверхностью, часто вызванный шиной колеса, ржавчиной, краской или мусором, уменьшит магнитное притяжение.
- Чем больше зазор, тем слабее притяжение.
- В CCmagnetics мы обладаем обширным опытом и данными о том, как зазоры влияют на притяжение магнитных колес, подкрепленными данными многочисленных проектов клиентов. Мы открыто делимся этими знаниями, чтобы помочь нашим клиентам.

Шина для магнитного колеса робота
Другие советы по выбору магнитных колес
- Ширина важнее диаметра: Распространенным заблуждением является то, что больший внешний диаметр магнитного колеса робота означает большую силу тяги. Это не основной фактор. Фактическая сила отрыва в основном определяется шириной колеса и классом магнитов, используемых внутри. Более широкое колесо означает большую площадь магнитного контакта с металлической поверхностью, что значительно увеличивает грузоподъемность.
Если вы проектируете робота и не уверены в расчете необходимой грузоподъемности для ваших магнитных колес, пожалуйста, не стесняйтесь обращаться в наш отдел продаж. Мы здесь, чтобы помочь вам определить лучшее решение для вашего применения.