
 English
English Русский
Русский Español
Español Français
Français 한국어
한국어 日本語
日本語
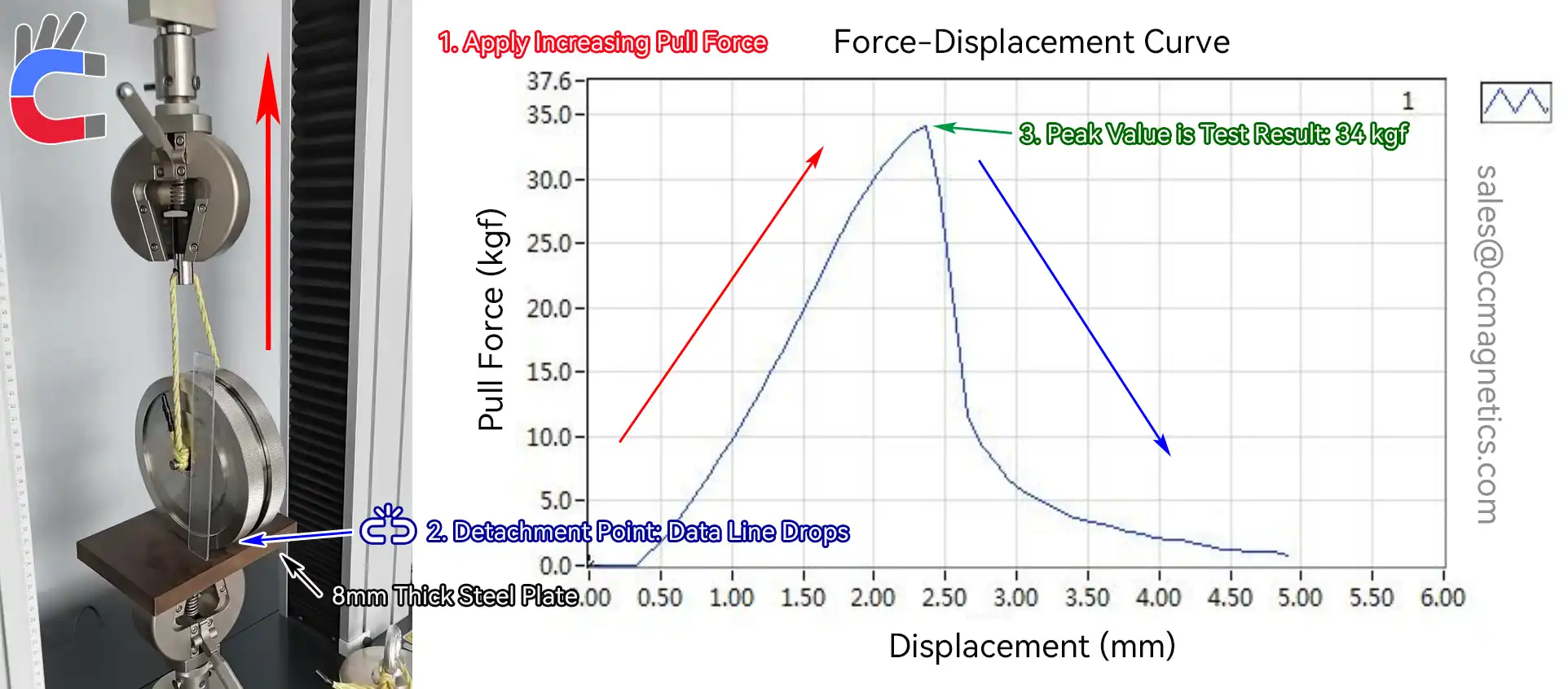
In der Regel erstellt CCmagnetics für jeden Kunden, der unsere WM-Serie von Roboter-Magneträdern verwendet, einen Zugtestbericht. Der Testbericht gibt die maximale Zugkraft an. Zum Beispiel kann ein Magnetrad mit einer maximalen Zugkraft von 34 kgf, wenn es in einem Vier-Rad-Setup mit einem Sicherheitsfaktor von 4 verwendet wird, 34 kg Gewicht sicher aufhängen. Es ist wichtig zu verstehen, dass die Tragfähigkeit des Magnetrades das Gewicht des Rades selbst beinhaltet. Daher müssen Sie dieses Gewicht bei der Auswahl der Räder für Ihren Roboter berücksichtigen. Detaillierte Formeln und Berechnungsmethoden finden Sie weiter unten in diesem Artikel.
Darüber hinaus wird die tatsächliche Tragfähigkeit in realen Anwendungen von mehreren Faktoren beeinflusst. Dazu gehören die Neigung, die Krümmung, die Dicke und das Material der Metalloberfläche, auf der das Roboter-Magnetrad läuft, sowie das Vorhandensein von Fremdkörpern. Auch die Frage, ob das Rad bereift ist, spielt eine Rolle. Wenn Sie sich bei diesen Faktoren unsicher sind oder Hilfe bei der Auswahl des richtigen Rads benötigen, teilen Sie unseren Mitarbeitern bitte Einzelheiten über die Arbeitsumgebung Ihres Roboters und sein Gesamtgewicht mit. Unser Team wird Ihnen gerne weiterhelfen.
Was sind magnetische Räder für Roboter?
Robot Magnetic Wheels sind so konzipiert, dass sie sich an verschiedene komplexe Oberflächenstrukturen anpassen. Im Inneren bestehen sie in der Regel aus Neodym-Permanentmagneten, während für die Außenseite Materialien wie Edelstahl und Gummi verwendet werden, damit sie fest auf Metalloberflächen haften.
Sie sind wesentliche Komponenten, die in Robotern für bestimmte Aufgaben verwendet werden, wie z. B.:
- Schiffsrumpf-Reinigungsroboter
- Sandstrahl- und Lackierroboter für Werften
- Tankreinigungsroboter
- Magnetische Schiffsrumpf-Raupenfahrzeuge
- Schiffsreinigungsroboter
- Unterwasser-Rumpfreinigungsroboter
Dank ihrer starken Magnetkraft können sie über längere Zeit an den gekrümmten Oberflächen von Schiffen und den runden Oberflächen von Öltanks haften bleiben. Sie spielen eine wichtige Rolle bei Wartungsarbeiten an Schiffen, Öltanks, Pipelines und ähnlichen Metallstrukturen.

Magnetische Übertragung
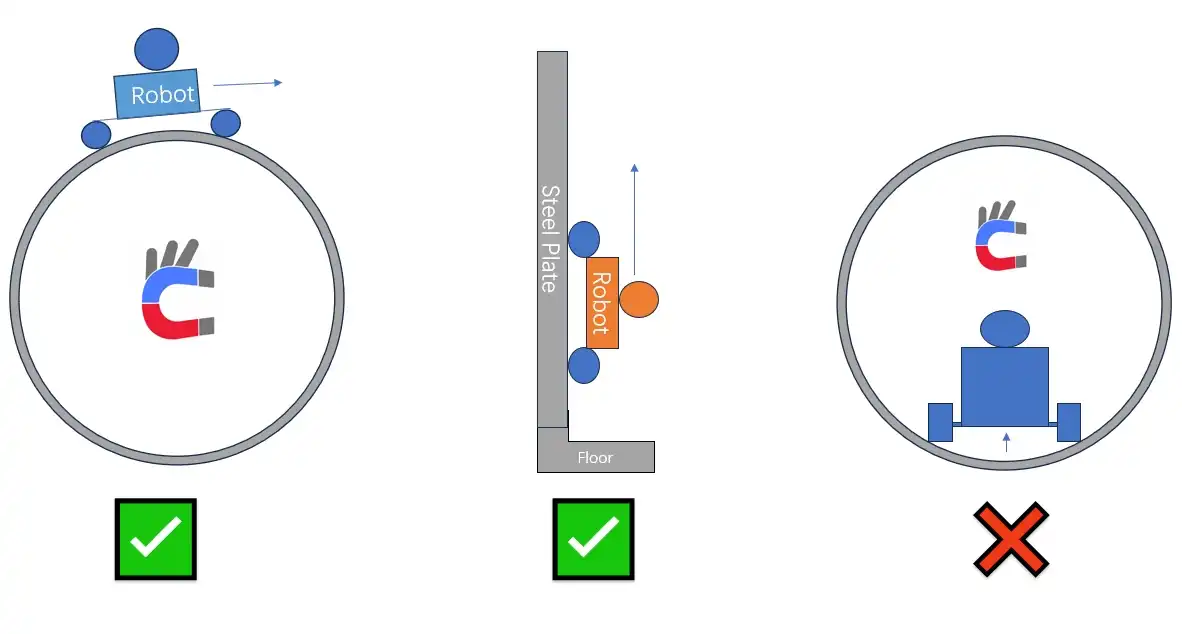
Eine zentrale Herausforderung bei der Auswahl von Magneträdern für Wandkletterroboter ist die genaue Berechnung ihrer vertikalen Tragfähigkeit. Die Ermittlung der realen Tragfähigkeit von Magneträdern basiert jedoch nicht nur auf dem Bericht über den Zugtest. Bei der Berechnung müssen auch die spezifische Arbeitsumgebung des Roboters und die Beschaffenheit der Metalloberfläche (z. B. Fremdkörper und Lücken) berücksichtigt werden.
Wie berechnet man die Magnetradlast eines Roboters?
Die Berechnung des Gewichts, das ein magnetisches Roboterrad vertikal tragen kann, ist für die Entwicklung sicherer und effektiver Roboter von entscheidender Bedeutung. Hier ist eine Aufschlüsselung:
1. Grundlegende Definition und Formel
kgf (Kilogramm-Kraft): Diese Einheit misst die Kraft. Man kann sie sich als die Kraft vorstellen, die durch die Schwerkraft auf eine 1-Kilogramm-Masse ausgeübt wird. In unserem Zusammenhang bedeuten 34 kgf, dass ein einzelnes Magnetrad eine maximale vertikale Haltekraft ausüben kann, die dem Gewicht von etwa 34 kg entspricht (das sind etwa 333,2 Newton oder N).
Berechnung der Aufhängungskapazität:
Das maximale Gewicht, das Sie mit einem Magnetrad sicher aufhängen können, wird anhand seiner Zugkraft und eines Sicherheitsfaktors (SF) berechnet.

2. Auswahl des Sicherheitsfaktors (SF)
Der Sicherheitsfaktor ist ein Multiplikator, der verwendet wird, um eine Sicherheitsmarge einzubauen, die Abweichungen und unerwartete Kräfte berücksichtigt. Ein höherer SF bedeutet eine größere Sicherheitsmarge. Hier sind einige Empfehlungen:
| Szenario | Empfohlener Sicherheitsfaktor (SF) | Erläuterung |
|---|---|---|
| Statische Belastung | 2 - 3 | Für den stationären Einsatz. Berücksichtigt die Materialermüdung. |
| Dynamische Belastung | 4 - 5 | Für sich bewegende Roboter. Berücksichtigt Trägheit, Vibration, etc. |
| Bereiche mit hohem Risiko | ≥6 | Gewährleistet Sicherheit auch unter extremen Bedingungen (z. B. Arbeiten in großer Höhe). |
3. Kapazität der Einzelradaufhängung
Berechnen wir nun die sichere Tragfähigkeit für ein einzelnes Rad:
Beispiel: Ein magnetisches Rad mit 34 kgf, das in einem dynamischen Betrieb verwendet wird (mit SF=4).

Hinweis: Diese 8,5 kg sind der sichere Gewichtsanteil des Roboters, den ein Rad tragen kann.
4. Gesamtkapazität der Fahrzeugaufhängung
Wenn Ihr Roboter mehrere Räder hat (z. B. bei einer vierrädrigen Konstruktion), ist die Gesamtaufhängungskapazität die Summe der sicheren Kapazität der einzelnen Räder.

Dabei ist n die Anzahl der Räder.
Beispiel: Ein vierrädriger Roboter mit vier 34 kgf schweren Rädern für dynamische Aufgaben (SF=4).

5. Realitätsnahe Anpassungen
Die obigen Berechnungen dienen als Grundlinie. In der Praxis müssen Sie je nach der tatsächlichen Arbeitsumgebung Anpassungen vornehmen:
(1) Arbeiten auf schrägen Flächen
Beim Klettern an Schrägen (z. B. auf einem Schiffsrumpf) zieht die Schwerkraft den Roboter nach unten, wodurch die effektive Magnetkraft, die für die vertikale Unterstützung zur Verfügung steht, verringert wird.
An einem Hang mit einem Winkel θ verringert sich die effektive Haltekraft um den Kosinus des Winkels.

Beispiel: An einem Hang von 30°, mit einer Gesamtmagnetkraft von 136 kgf (von 4 Rädern) und SF=4.

(2) Stoßbelastungen (plötzliche Stopps/Starts)
Wenn Ihr Roboter schnell anhalten oder beschleunigen muss, entstehen durch die Trägheit zusätzliche Kräfte (Stoßbelastungen), denen der Magnethalter standhalten muss. Dadurch wird die Belastung effektiv erhöht.

Wo:
- a ist die Beschleunigung/Verzögerung.
- g ist die Beschleunigung aufgrund der Schwerkraft (ca. 9,8 m/s²).
Beispiel: Ein statischer Roboter mit 34 kg Gewicht erfährt eine Beschleunigung von a=3m/s².

6. Technische Empfehlungen
-
Lastanpassung:
Zur sicheren Aufhängung eines Roboters mit einem Gewicht von 34 kg:
- Für dynamische Szenarien: Sie benötigen mindestens eine Gesamtkapazität, die der Berechnung des
hängenden Gesamtgewichtsentspricht (z. B. 4 Räder mit 34 kgf bei SF=4). - Für statische Szenarien: Sie brauchen vielleicht weniger (z. B. 2 Räder mit 34 kgf bei SF=2), aber denken Sie an die Sicherheit.
- Für dynamische Szenarien: Sie benötigen mindestens eine Gesamtkapazität, die der Berechnung des
-
Redundanz: Es wird oft empfohlen, dass die gesamte verfügbare Magnetkraft mindestens das Fünffache des Zielgewichts beträgt. Dies bietet einen erheblichen Puffer für unerwartete Kräfte oder Oberflächenprobleme.
-
Feldtest: Überprüfen Sie immer die tatsächliche Haftkraft mit einem Zugkraftmesser auf der Zieloberfläche. Labordaten können die Leistung unter realen Bedingungen manchmal überbewerten.
7. Schnellreferenz-Tabelle
Hier ist eine einfache Tabelle, die auf einem 34 kgf-Rad basiert und schnelle Schätzungen ermöglicht:
| Magnetische Einzelradkraft (kgf) | Sicherheitsfaktor (SF) | Sichere Einzelrad-Kapazität (kg) | Vier-Rad-System Gesamtkapazität (kg) |
|---|---|---|---|
| 34 | 2 | 17 | 68 |
| 34 | 4 | 8.5 | 34 |
| 34 | 6 | ≈5.7 | ≈22.8 |
Faktoren, die die Leistung des Magnetrads eines Roboters beeinflussen, und Ihr Sicherheitsfaktor
Der Zugtest liefert zwar einen Anhaltspunkt, aber mehrere Faktoren aus der Praxis beeinflussen die tatsächliche Magnetkraft und den Sicherheitsfaktor, den Sie verwenden sollten:
-
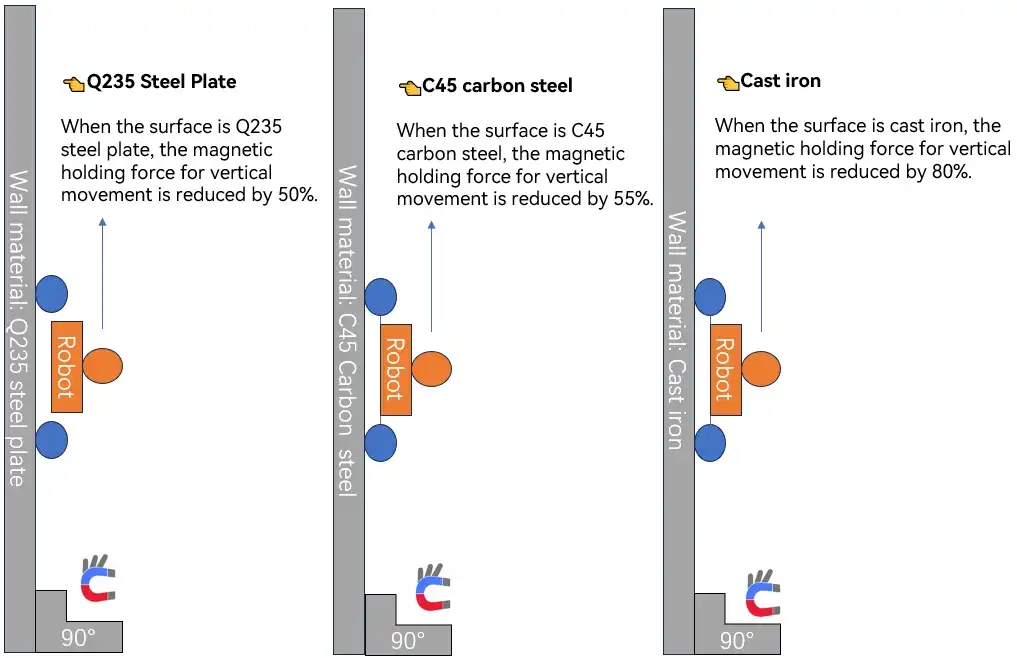
Eigenschaften der Metalloberfläche:
- Dicke und Qualität: Im Allgemeinen sollte die Metalloberfläche dicker als 5 mm sein, damit das Magnetrad seine volle potenzielle Anziehungskraft entfalten kann. Aber auch die spezifische Art oder "Sorte" des Metalls spielt eine wichtige Rolle. Unterschiedliche Metalllegierungen, wie auch verschiedene Stahlsorten (z. B. Q235-Stahl im Vergleich zu anderen), führen zu unterschiedlichen Haftkräften.
-
Spalt zwischen Rad und Oberfläche:
- Jede Lücke zwischen dem magnetischen Rad und der Metalloberfläche, die oft durch den Reifen des Rades, Rost, Farbe oder Schmutz verursacht wird, verringert die magnetische Anziehungskraft.
- Je größer der Spalt ist, desto schwächer ist die Anziehungskraft.
- CCmagnetics verfügt über umfangreiche Erfahrungen und Daten darüber, wie sich die Spaltmaße auf die Ansaugung von Magneträdern auswirken, die durch Daten aus zahlreichen Kundenprojekten gestützt werden. Wir geben dieses Wissen offen weiter, um unseren Kunden zu helfen.

Magnetischer Roboterradreifen
Andere Tipps zur Auswahl von Magneträdern
- Die Breite ist wichtiger als der Durchmesser: Es ist ein weit verbreitetes Missverständnis, dass ein größerer Außendurchmesser des Roboter-Magnetrads eine stärkere Anziehungskraft bedeutet. Das ist nicht der wichtigste Faktor. Die tatsächliche Anziehungskraft wird hauptsächlich durch die Breite des Rads und die Qualität der darin verwendeten Magnete bestimmt. Ein breiteres Rad bedeutet eine größere magnetische Kontaktfläche mit der Metalloberfläche, was die Tragfähigkeit deutlich erhöht.
Wenn Sie ein Roboterfahrzeug entwerfen und sich nicht sicher sind, wie Sie die erforderliche Tragfähigkeit für Ihre Magneträder berechnen sollen, wenden Sie sich bitte an unser Vertriebsteam. Wir helfen Ihnen gerne, die beste Lösung für Ihre Anwendung zu finden.