
 English
English Русский
Русский Español
Español Français
Français 한국어
한국어 日本語
日本語
In der industriellen Instandhaltung stellen große Stahlkonstruktionen wie Schiffe und Tanks viele Probleme dar. Dazu gehören Risiken in großen Höhen, komplexe Formen und eine geringe manuelle Effizienz. Wandkletterroboter müssen an den Seitenwänden von Schiffen haften und sich darauf bewegen. Diese Wände können sich auf verschiedene Weise biegen. Sie haben raue Oberflächen, selbst wenn Roboter Lasten tragen. Wenn ein Roboter auf eine Schiffsoberfläche sprüht, entsteht eine Reaktionskraft zwischen ihnen. Die Magneträder benötigen eine starke Saugkraft, um diese Kraft zu bewältigen. Die Magneträder der WM-Serie von CCmagnetics bieten eine starke Lösung. Ihre Permanentmagnettechnologie steigert die Leistung.

I. Magnetische Adsorptionstechnologie: Die Kernantriebskraft von Wandkletterrobotern
(I) Vergleich von Adsorptionsmethoden und Vorteile von Permanentmagneten
Wandkletterroboter verwenden zwei primäre Adsorptionsmethoden: elektromagnetische und permanentmagnetische Adsorption. Die permanentmagnetische Adsorption ist am besten für Metalloberflächen geeignet. Ihre Stärke ist 3 bis 5 Mal größer als die anderer Methoden und sie bewältigt Wanddefekte besser.
Elektromagnetisch vs. Permanentmagnet:
- Elektromagnetisch: Einstellbare Saugkraft erfordert ständige Stromversorgung. Bei Stromausfall besteht Absturzgefahr.
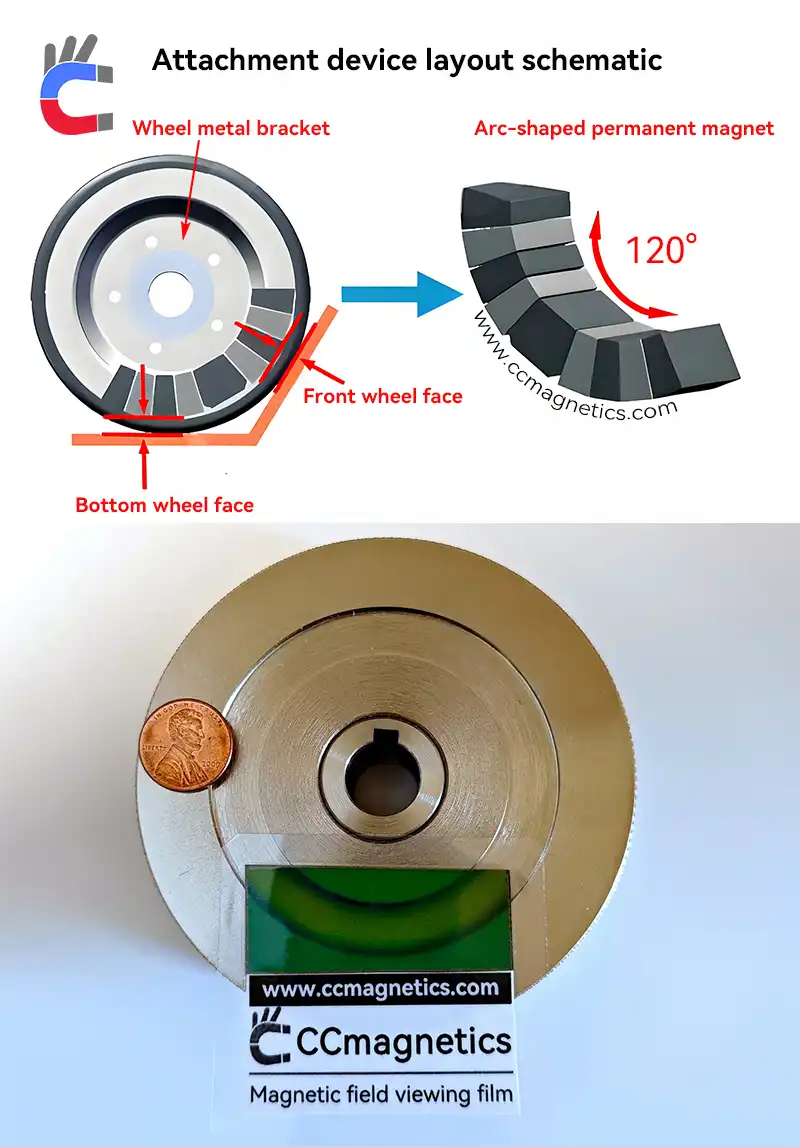
- Permanentmagnet (Kerntechnologie der WM-Serie): Sie verwendet leistungsstarke Neodym-Eisen-Bor-Magnete. Dies erzeugt eine starke, dauerhafte Kraft. Die optimierte Magnetpolanordnung gleicht Abstand und Saugkraft aus. Der Abstand reicht von 0 bis 5 mm, während die Saugkraft von 50 bis 500 N pro Rad variiert. Dieses Design funktioniert gut auf komplexen Oberflächen.
(II) Technische Parameter der Magneträder der WM-Serie
-
- Abmessungen: Außendurchmesser beträgt 40 bis 180 mm. Sie können die Breite für verschiedene Robotergrößen anpassen.
- Tragfähigkeit: Jedes Rad trägt je nach Modell 5-150 kg. Es kann schwere Werkzeuge handhaben, wie z. B. Ultrahochdruck-Wasserstrahlen (280 MPa).
- Prüfbericht: Enthält Daten zu Saugkraft und Schlagfestigkeit. Es hält einem Druck von 2.800 bar für einen sicheren Betrieb stand.

II. Typische Anwendungsszenarien: Vollständige Szenarioabdeckung von Lagertanks bis zu Schiffen
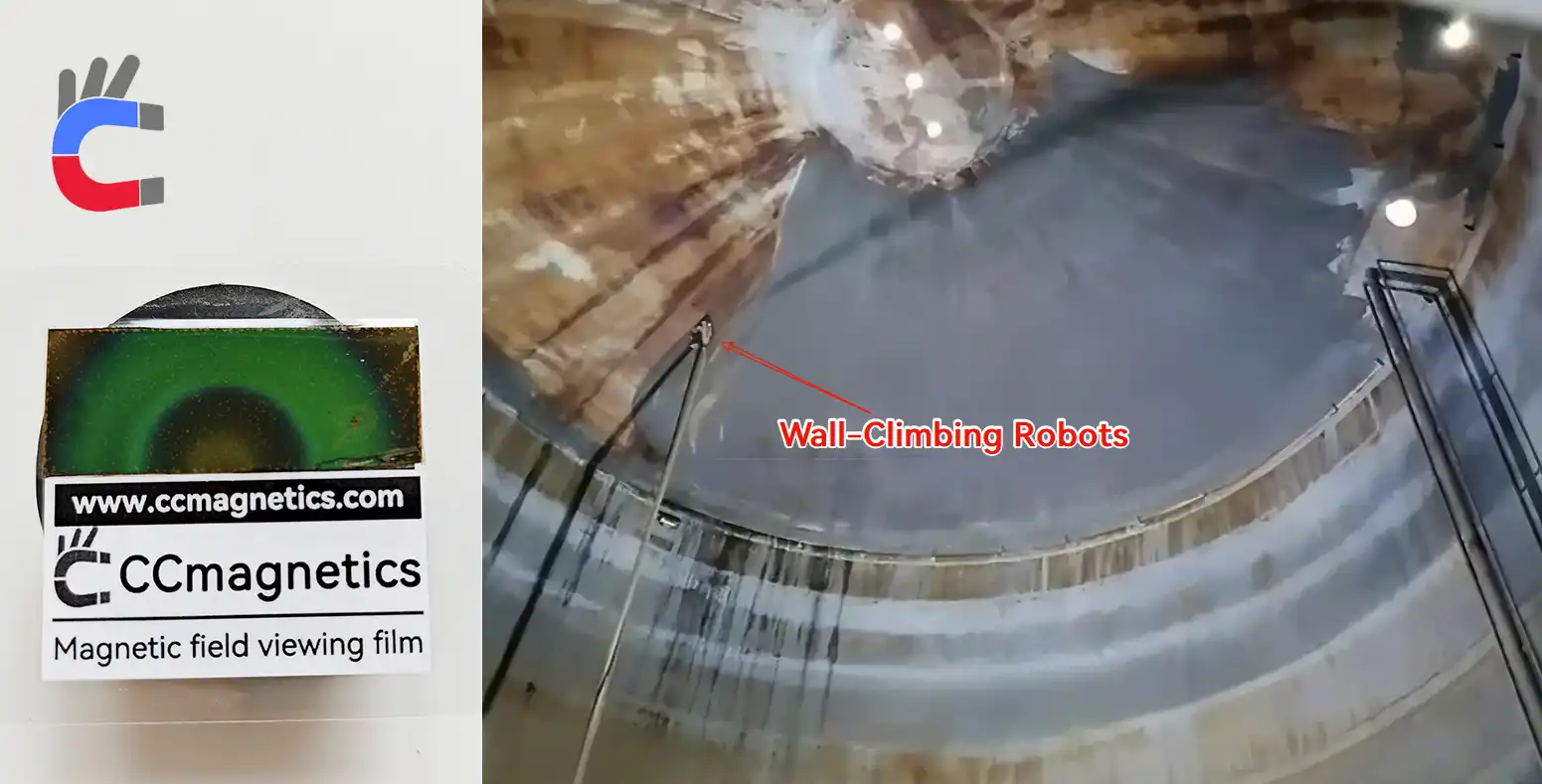
(I) Korrosionsschutz und Entrostung von Lagertanks: Lösung der Herausforderungen von "Arbeiten in großer Höhe"
-
- Traditionelle manuelle Schmerzpunkte:
- Hohes Absturzrisiko; Staub und Farbe stellen Gesundheitsgefahren dar.
- Geringe Effizienz (manuelle Arbeit an einem tausend Quadratmeter großen Tank dauert Wochen) und ungleichmäßige Behandlung.
- Abwasser und Abfallrückstände schaden der Umwelt.
- Intelligente Lösung angetrieben durch Magneträder:
- Integriertes Design: Das Radfahrgestell verfügt über Permanentmagneträder. Dies ermöglicht eine 360°-Lenkung und hilft beim Überqueren von Schweißnähten und unebenen Oberflächen. Es löst die Lenk- und Antriebskraftprobleme, mit denen Kettenroboter konfrontiert sind.
- Ultrahochdruck-Entrostung: Diese Methode erreicht eine Effizienz von 60-90 m²/h. Sie erreicht die Güteklasse Sa2,5 und verwendet ein Vakuum-Rückgewinnungssystem für schnelle Entrostung und Trocknung. Dies stellt sicher, dass der Prozess über 95 % des Abwassers zurückgewinnt.
- Lackiervorgang: Die Breite der Spritzpistole reicht von 300 bis 1000 mm. Sie hat eine Effizienz von 9 bis 18 m²/min. Das eingebaute Gyroskop nimmt automatische Korrekturen für eine bessere Beschichtungsgleichmäßigkeit vor.
- Traditionelle manuelle Schmerzpunkte:

- Anpassung an Arbeitsbedingungen: Von Lagertanks zu komplexen Innenumgebungen:
- Außenwand: Sie bewältigt Krümmungen mit dem kleinsten Radius von 2 m. Sie funktioniert auch gut bei extremem Wetter und bleibt bei Wind unter Stufe 6 stabil.
- Innenwand: Sie wird ferngesteuert. Sie überquert Schweißnähte und Wasserbereiche. Dies ermöglicht unbemanntes Schleifen und Lackieren. Infolgedessen verkürzt es die Bauzeit um über 50 %.

Magnetische Übertragung
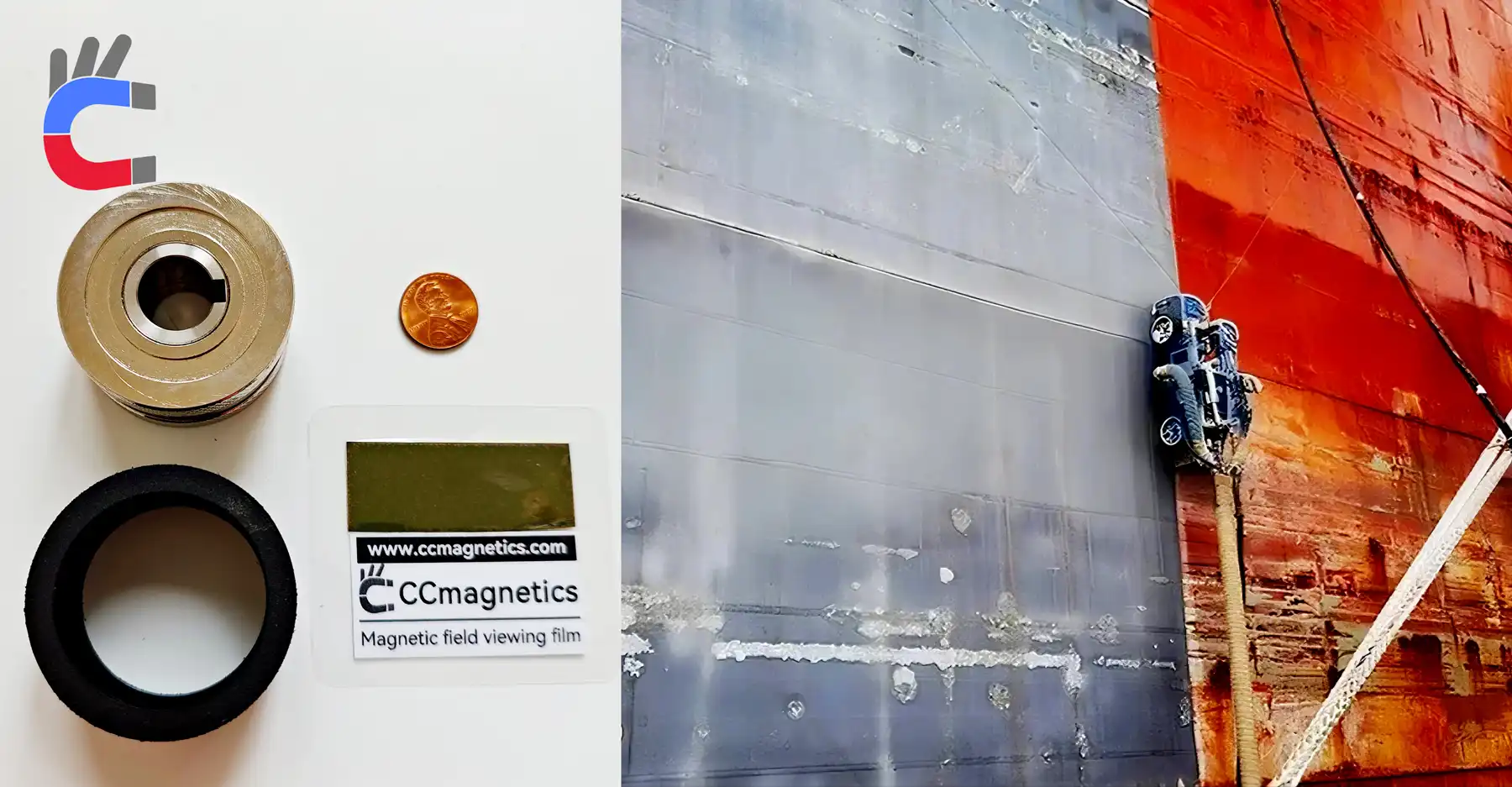
(II) Schiffsrumpfwartung: Verbesserung von Umweltschutz und Effizienz
- Magnetradroboter reduzieren Gefahren bei manuellen Operationen. Traditionelles Sandstrahlen verursacht Staubverschmutzung, während Hochdruckwasser-Entrostung eine Alternative ist. Aber Handspritzpistolen stehen vor drei Hauptproblemen:
- Abwasser verursacht Sekundärverschmutzung am Rumpf.
- Oberflächenfeuchtigkeit führt zu erneutem Rosten und beeinträchtigt Beschichtungen.
- Hohe Risiken bei Operationen über 230 MPa.
- Technische Durchbrüche von Magnetradrobotern:
- Last und Stabilität: Er gleitet sanft auf gekrümmten Schiffsoberflächen, wie z. B. Wulstbugen und Aufbauten. Er arbeitet mit einer Effizienz von 60-75 m²/h und entspricht der Leistung von sechs manuellen Arbeitern.
- Qualitätskonsistenz: Mechanisierte Operationen stoppen Fehler und reduzieren Korrosion durch Ermüdung. Dies verbessert die Gleichmäßigkeit der Entrostung um 30 %.
III. Zusammenfassung der Kernvorteile von magnetisch adsorbierenden Wandkletterrobotern
Vorteilsdimension
-
- Adsorptionsstabilität: Die Kraftänderungsrate für Permanentmagneträder liegt unter 10 %. Im Gegensatz dazu überschreiten elektromagnetische Räder 30 %. Es unterstützt eine stabile Adsorption mit einem Spalt von 0-3 mm. Dieses Design eliminiert Rutsch- und Sturzrisiken und passt sich an defekte Wände an.
- Bewegungsflexibilität: Verfügt über ein Allradantriebs-Chassis mit Differentiallenkung. Der kleinste Wenderadius beträgt 200 mm, und er kann Hindernisse bis zu 15 mm Höhe überqueren. Dies ermöglicht es ihm, komplexe Strukturen mit Leichtigkeit zu navigieren.
- Tragfähigkeit: Jeder Roboter kann die größte Last von 200 kg tragen. Er kann Ultrahochdruckpumpen und Rückgewinnungsgeräte verwenden. Dies vervollständigt den gesamten Prozess von "Entrostung, Rückgewinnung und Sprühen".
- Umweltanpassungsfähigkeit: Arbeitet bei Temperaturen von -40℃ bis 80℃. Er hat eine IP68-Einstufung und ist beständig gegen Salznebel, was ihn für Schiffe und Offshore-Plattformen geeignet macht. Er funktioniert gut unter extremen Bedingungen, wie z. B. in Polarregionen und bei hoher Luftfeuchtigkeit.
IV. Zukunftsausblick: Von "Ersatz manueller Arbeit" zu "Definition von Standards"
Magnetische Wandkletterroboter bewegen sich jetzt über Lagertanks und Schiffe hinaus. Dieser Wandel ist Teil der weltweiten Bemühungen, Energie zu sparen und die Umwelt zu schützen. Sie dringen nun in Bereiche wie Kernenergieeinschlüsse und Brückenstahlkonstruktionen ein. CCmagnetics und ähnliche Unternehmen stehen vor Herausforderungen wie "Adsorption, Bewegung und Betrieb". Sie lösen diese Probleme mit kundenspezifischen Designs und Kreativität. Diese Innovation schafft neue Möglichkeiten für die Arbeit auf komplexen Oberflächen.
Zum Beispiel hat CCmagnetics wasserdichte Magneträder eingeführt. Dies sind permanente Räder, die für die Reinigung der Unterseite von Schiffen unter Wasser entwickelt wurden. Dies reduziert die Kosten für die Schiffsreinigung erheblich. Kleine Schiffe haben im Laufe der Geschichte Taucher für Reinigungsaufgaben benötigt. Arbeiter reinigen große Schiffe im Dock. Jetzt gibt es Raupenroboter mit NdFeB-Permanentmagneträdern. Diese Roboter können Schiffe unter Wasser ohne Pause reinigen. Magneträder haben Herausforderungen. Eine davon ist, wie Permanentmagnete das Rutschen auf Algen stoppen können. Eine andere ist, ob spezielle Gummireifen die Saugkraft unter Wasser verändern. CCmagnetics hat eine gründliche Untersuchung durchgeführt und Lösungen für diese Probleme gefunden.