
 English
English Deutsch
Deutsch Русский
Русский Español
Español Français
Français 한국어
한국어
産業メンテナンスにおいて、船舶やタンクのような大型鋼構造物には多くの問題があります。これらには、高所作業のリスク、複雑な形状、そして手作業の効率の低さが含まれます。壁面登攀ロボットは、船舶の側壁に吸着して移動する必要があります。これらの壁はさまざまな方法で曲がることがあります。ロボットが荷物を運んでいるときでさえ、表面は粗い場合があります。ロボットが船の表面にスプレーすると、それらの間に反作用力が発生します。マグネットホイールは、この力を管理するために強力な吸引力を必要とします。CCmagneticsのWMシリーズマグネットホイールは、強力なソリューションを提供します。その永久磁石技術は性能を向上させます。

I. 磁気吸着技術:壁面登攀ロボットの核心的駆動力
(I) 吸着方法の比較と永久磁石の利点
壁面登攀ロボットは、電磁吸着と永久磁石吸着の2つの主要な吸着方法を使用します。永久磁石吸着は金属表面に最適です。その強度は他の方法の3〜5倍であり、壁の欠陥をよりよく処理します。
電磁石 vs. 永久磁石:
- 電磁石:調整可能な吸引力には一定の電力が必要です。停電時には落下の危険があります。
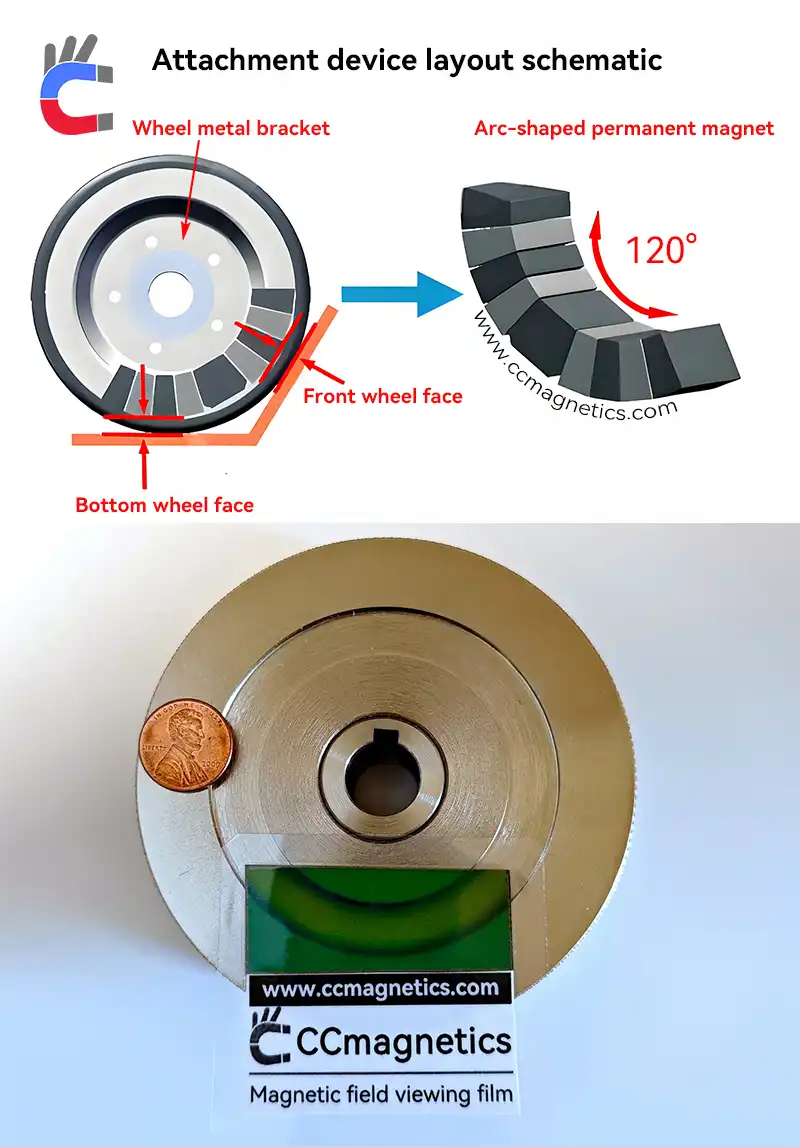
- 永久磁石(WMシリーズの核心技術):強力なネオジム鉄ホウ素磁石を使用します。これにより、強力で持続的な力が生まれます。最適化された磁極配置は、距離と吸引力のバランスをとります。距離は0〜5 mmの範囲で、吸引力はホイールあたり50〜500 Nの範囲です。この設計は複雑な表面で優れた性能を発揮します。
(II) WMシリーズマグネットホイールの技術パラメータ
-
- 寸法:外径は40〜180 mmです。さまざまなロボットサイズに合わせて幅をカスタマイズできます。
- 耐荷重:モデルに基づいて、各ホイールは5〜150 kgをサポートします。超高圧ウォータージェット(280 MPa)のような重いツールを処理できます。
- テストレポート:吸引力と耐衝撃性に関するデータが含まれています。安全な操作のために2,800バールの圧力に耐えることができます。

II. 代表的な適用シナリオ:貯蔵タンクから船舶までの全シナリオカバー
(I) 貯蔵タンクの防食および錆除去:「高所作業」の課題の解決
-
- 従来の手作業の課題:
- 落下の高いリスク。粉塵や塗料が健康被害をもたらす。
- 効率の低さ(千平方メートルのタンクの手作業には数週間かかる)と不均一な処理。
- 廃水と廃棄物残渣が環境を害する。
- マグネットホイール駆動のインテリジェントソリューション:
- 統合設計:ホイールシャーシには永久磁石ホイールがあります。これにより、360度のステアリングが可能になり、溶接継ぎ目や凹凸のある表面を横切るのに役立ちます。これは、クローラーロボットが直面するステアリングと駆動力の問題を解決します。
- 超高圧錆除去:この方法は60〜90㎡/hの効率を達成します。Sa2.5グレードに達し、真空回収システムを使用して迅速な錆除去と乾燥を行います。これにより、プロセスが廃水の95%以上を回収することを保証します。
- 塗装作業:スプレーガンの幅は300〜1000 mmの範囲です。効率は9〜18 m²/分です。内蔵ジャイロスコープが自動補正を行い、コーティングの均一性を向上させます。
- 従来の手作業の課題:
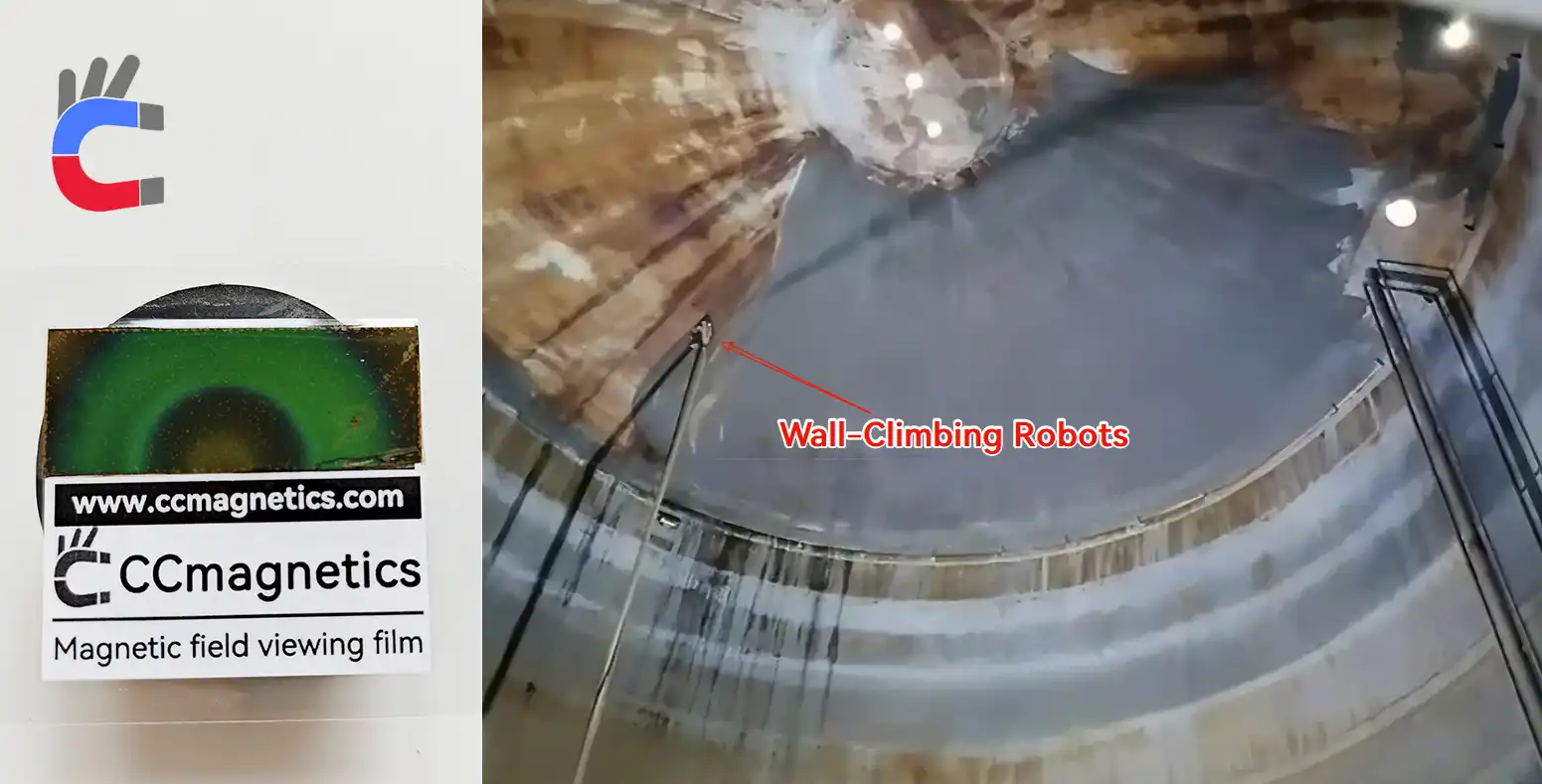

- 作業条件への適応:貯蔵タンクから複雑な内部環境へ:
- 外壁:最小半径2mの曲率を処理します。また、極端な天候でもうまく機能し、レベル6未満の風で安定しています。
- 内壁:リモートコントロールされます。溶接継ぎ目や水域を横断します。これにより、無人の研削と塗装が可能になります。その結果、工期を50%以上短縮します。

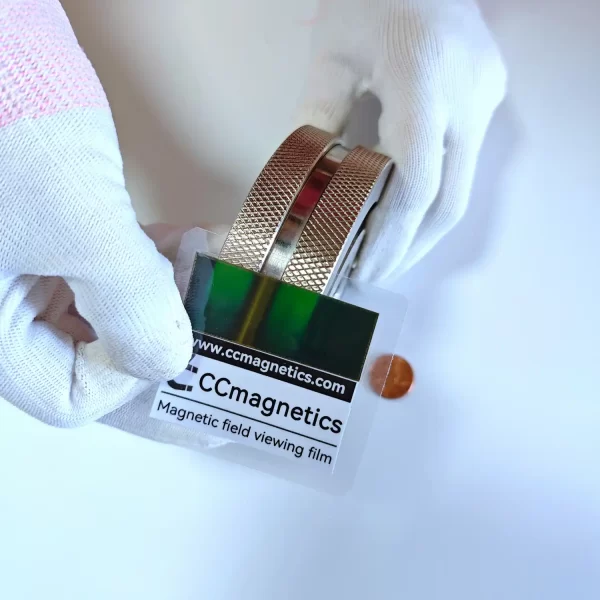
磁気伝送
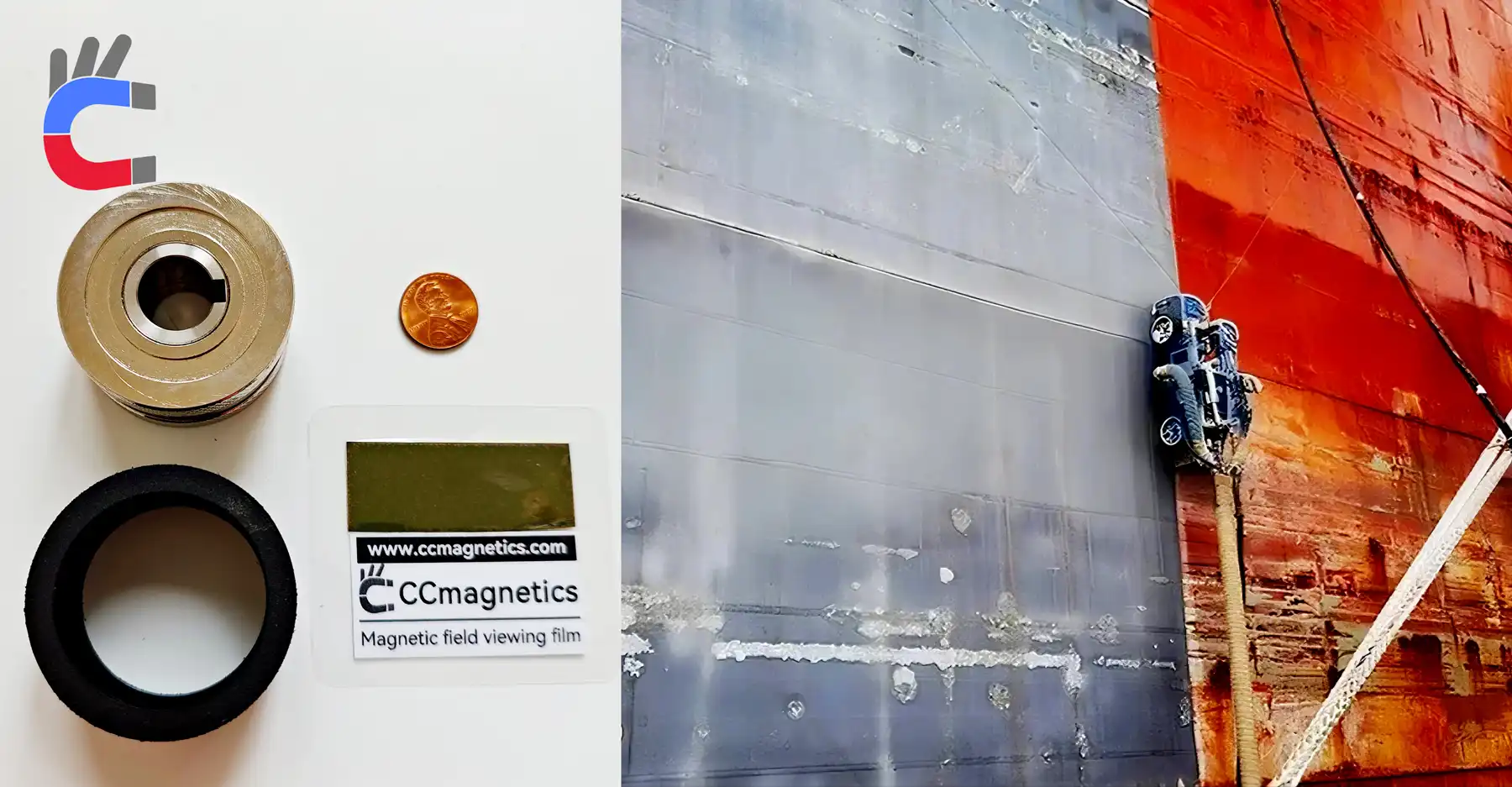
(II) 船体メンテナンス:環境保護と効率の向上
- マグネットホイールロボットは、手作業の危険性を減らします。従来のサンドブラストは粉塵汚染を引き起こしますが、高圧水錆除去は代替手段です。しかし、ハンドヘルドスプレーガンは3つの主な問題に直面しています:
- 廃水は船体に二次汚染を引き起こします。
- 表面の水分は再発錆につながり、コーティングに影響を与えます。
- 230 MPaを超える作業には高いリスクが伴います。
- マグネットホイールロボットの技術的ブレークスルー:
- 負荷と安定性:バルバスバウや上部構造などの湾曲した船体表面をスムーズに滑走します。60〜75 m²/hの効率で動作し、手作業員6人の出力に匹敵します。
- 品質の一貫性:機械化された作業はエラーを止め、疲労による腐食を減らします。これにより、錆除去の均一性が30%向上します。
III. 磁気吸着壁面登攀ロボットの核心的利点の要約
利点の次元
-
- 吸着安定性:永久磁石ホイールの力変化率は10%未満です。対照的に、電磁石ホイールは30%を超えます。0〜3 mmのギャップで安定した吸着をサポートします。この設計は、滑落のリスクを排除し、欠陥のある壁に適応します。
- 移動の柔軟性:差動ステアリングを備えた四輪駆動シャーシを特徴としています。最小回転半径は200 mmで、高さ15 mmまでの障害物を越えることができます。これにより、複雑な構造を簡単にナビゲートできます。
- 耐荷重:各ロボットは最大200 kgの負荷を運ぶことができます。超高圧ポンプと回収装置を使用できます。これにより、「錆除去、回収、およびスプレー」の全プロセスが完了します。
- 環境適応性:-40℃から80℃の温度で動作します。IP68定格を持ち、塩水噴霧に耐性があるため、船舶やオフショアプラットフォームに適しています。極地や高湿度の極端な条件でも優れた性能を発揮します。
IV. 今後の展望:「手作業の代替」から「標準の定義」へ
磁気壁面登攀ロボットは現在、貯蔵タンクや船舶を超えて移動しています。この変化は、エネルギーを節約し、環境を保護するための世界的な取り組みの一部です。それらは現在、原子力発電の格納容器や橋梁の鋼構造物などの分野に参入しています。CCmagneticsや同様の企業は、「吸着、移動、および操作」のような課題に直面しています。彼らはカスタム設計と創造性でこれらの問題を解決します。この革新は、複雑な表面での作業の新しい可能性を生み出します。
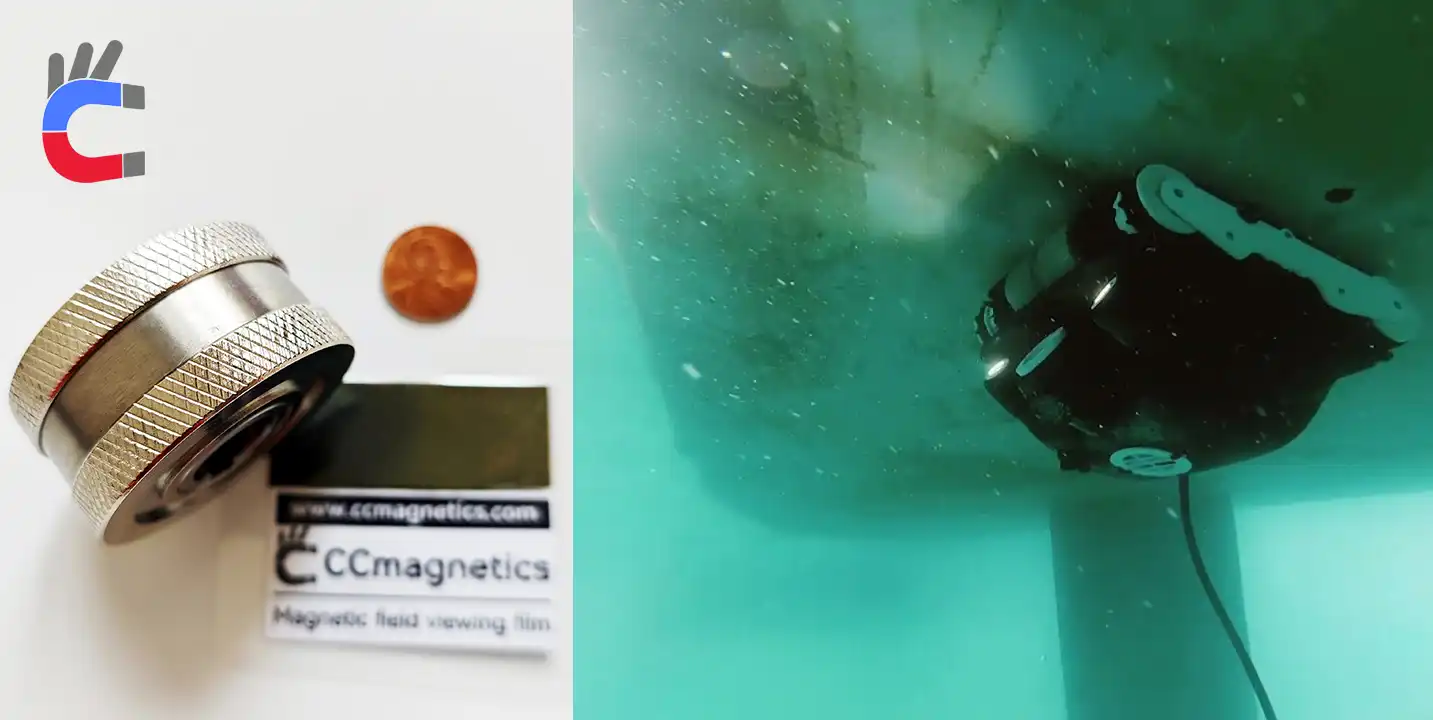
例えば、CCmagneticsは防水マグネットホイールを導入しました。これらは、水中で船の底面を清掃するために設計された永久ホイールです。これにより、船の清掃コストが大幅に削減されます。小型船は歴史を通じて清掃作業のためにダイバーを必要としてきました。作業員はドックで大型船を清掃します。現在では、NdFeB永久磁石ホイールを備えたクローラーロボットがあります。これらのロボットは、休むことなく水中で船を清掃できます。マグネットホイールには課題があります。一つは、永久磁石が藻類での滑りをどのように止めることができるかです。もう一つは、特殊なゴムタイヤが水中の吸引力を変えるかどうかです。CCmagneticsは徹底的な調査を行い、これらの問題に対する解決策を見つけました。