
 English
English Deutsch
Deutsch Русский
Русский Français
Français 한국어
한국어 日本語
日本語
Los robots submarinos (ROV o AUV) desempeñan un papel cada vez más vital en las operaciones submarinas. Su capacidad para realizar tareas de manera eficiente y estable depende en gran medida del rendimiento de sus componentes principales. Para los robots submarinos que necesitan moverse sobre superficies metálicas, la elección de las ruedas magnéticas es crucial. Este artículo profundiza en los factores clave a considerar al seleccionar ruedas magnéticas para robots submarinos, ayudándole a tomar una decisión informada.
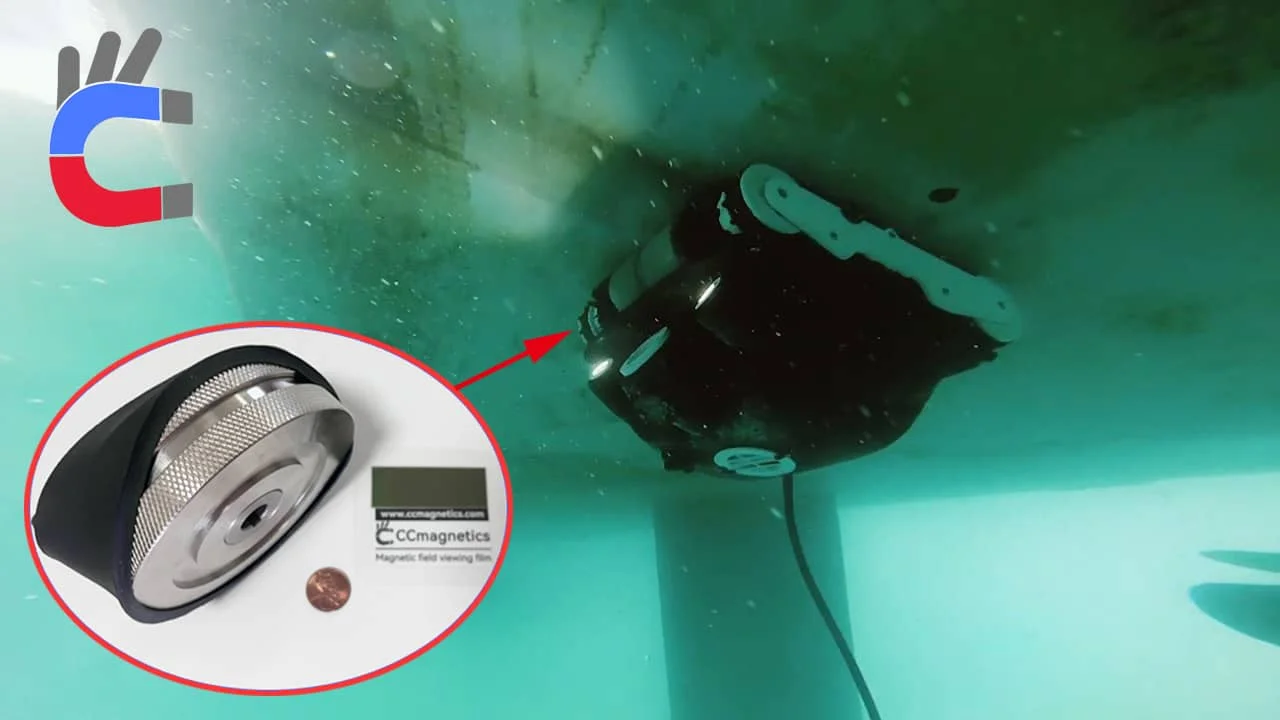
1. Impermeabilización, resistencia a la corrosión y sellado: Los rigores del entorno submarino
El entorno submarino es muy diferente al terrestre, con alta presión y medios corrosivos (como sales y diversos microorganismos en el agua de mar) que imponen exigencias extremadamente altas a la impermeabilización y resistencia a la corrosión del equipo.
Diseño de estructura totalmente sellada: Este es el requisito más básico y crítico para las ruedas magnéticas submarinas. Los materiales magnéticos y los componentes mecánicos dentro de la rueda magnética deben estar completamente aislados del agua para evitar el ingreso, lo que podría provocar corrosión, cortocircuitos o fallas mecánicas. Técnicas como juntas tóricas, sellos de ferrofluido o sellos soldados se utilizan comúnmente para lograr una impermeabilización de alto grado.
Selección de materiales: La carcasa exterior y los componentes internos de la rueda magnética deben estar hechos de materiales resistentes a la corrosión, como acero inoxidable (especialmente acero inoxidable de grado marino 316L), aleación de titanio o plásticos de ingeniería. Para los imanes en sí, aunque los imanes permanentes (como Neodimio-Hierro-Boro) ofrecen una fuerte fuerza magnética, son altamente susceptibles a la oxidación en ambientes húmedos. Por lo tanto, son esenciales tratamientos especiales anticorrosión, como encapsulación de resina epoxi, galvanoplastia de níquel-cobre-níquel (Ni-Cu-Ni) o recubrimientos de polímero.
Fuerza magnética y penetración: El entorno submarino no afecta inherentemente la penetración de la fuerza magnética. La fuerza magnética depende del rendimiento del imán y del diseño del circuito magnético. Sin embargo, las ruedas magnéticas submarinas pueden tener que lidiar con superficies de casco cubiertas por bioincrustaciones (p. ej., percebes, algas) o recubrimientos. Estos medios aumentan la distancia entre el campo magnético y la superficie metálica, debilitando así la adhesión efectiva. Por lo tanto, se necesitan ruedas magnéticas con una fuerza magnética suficientemente fuerte para superar estos espacios.
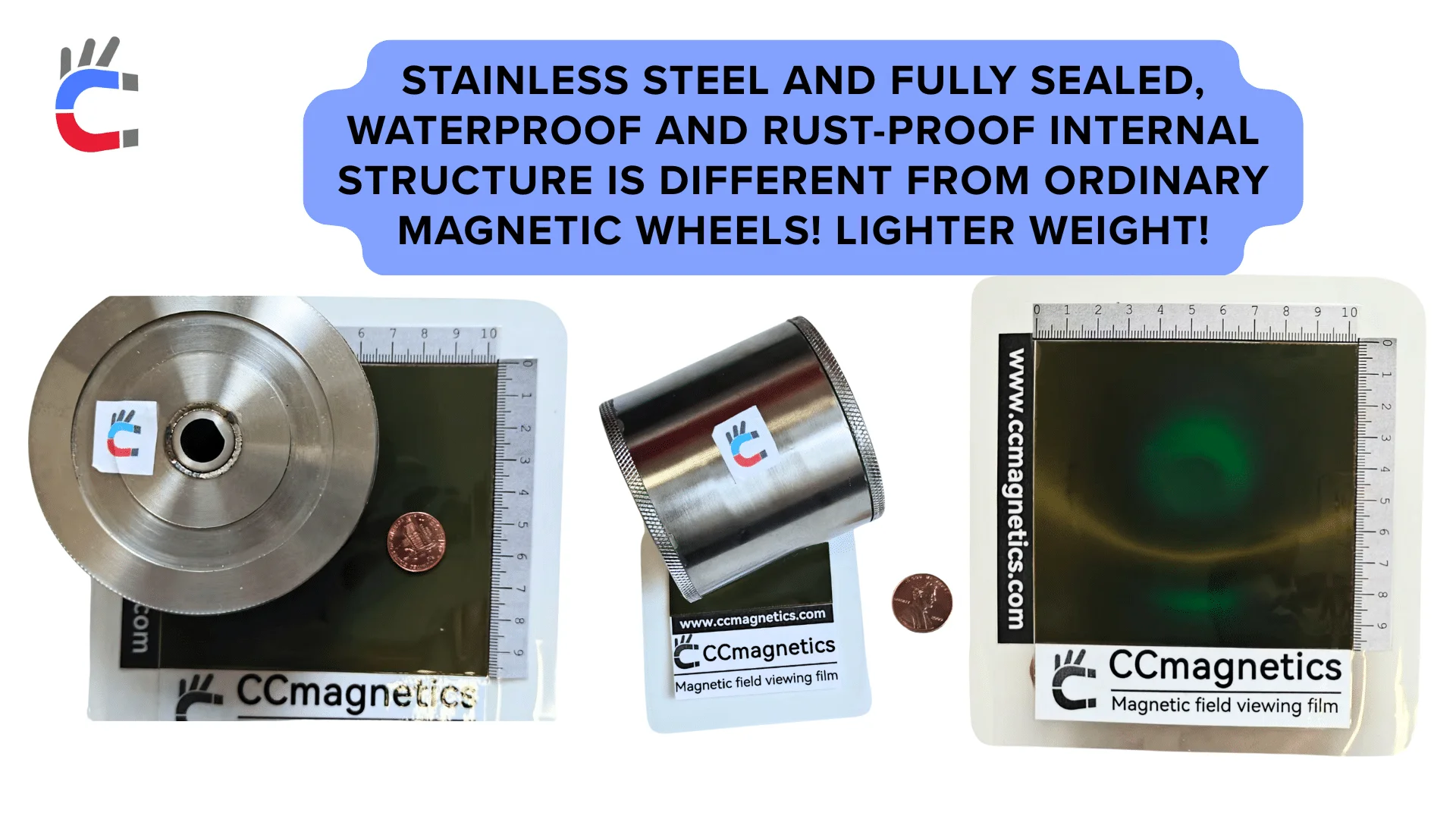

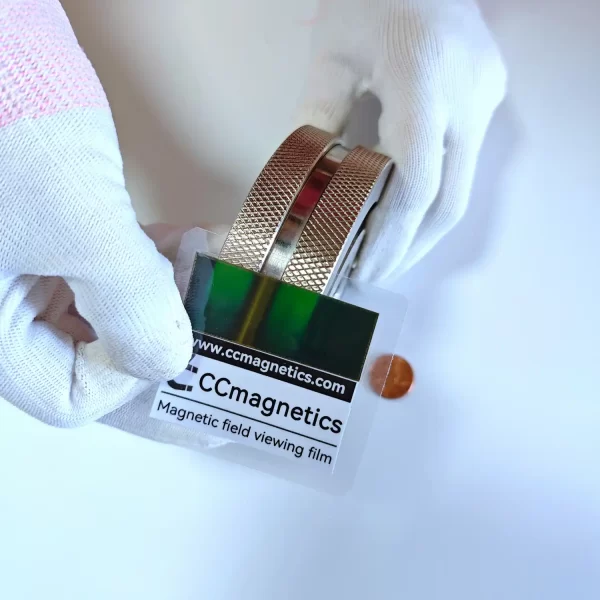
Transmisión magnética
2. Fundas protectoras de caucho: Prevención de arañazos en el casco
Instalar o no una funda de caucho depende del escenario de aplicación y de los requisitos de la superficie del objeto que se inspecciona.
Protección de la pintura del casco: Para robots que necesitan adherirse e inspeccionar o limpiar el casco, tuberías u otras superficies recubiertas, la adición de fundas de caucho resistentes al desgaste es crucial. Las fundas de caucho pueden aumentar eficazmente la fricción y evitar que las ruedas magnéticas entren en contacto directo con la superficie del casco y causen arañazos, especialmente en recubrimientos de alto valor o que se dañan fácilmente.
Aumento de la fricción: Las fundas de caucho también aumentan significativamente el coeficiente de fricción entre la rueda magnética y la superficie de contacto, mejorando el agarre del robot en superficies resbaladizas o sucias, mejorando así la estabilidad de la movilidad y la capacidad de escalada.
Material y durabilidad: El material de la funda de caucho debe poseer buena resistencia al desgaste, resistencia a la corrosión, resistencia a los rayos UV y propiedades antienvejecimiento para soportar el uso a largo plazo en el entorno submarino.

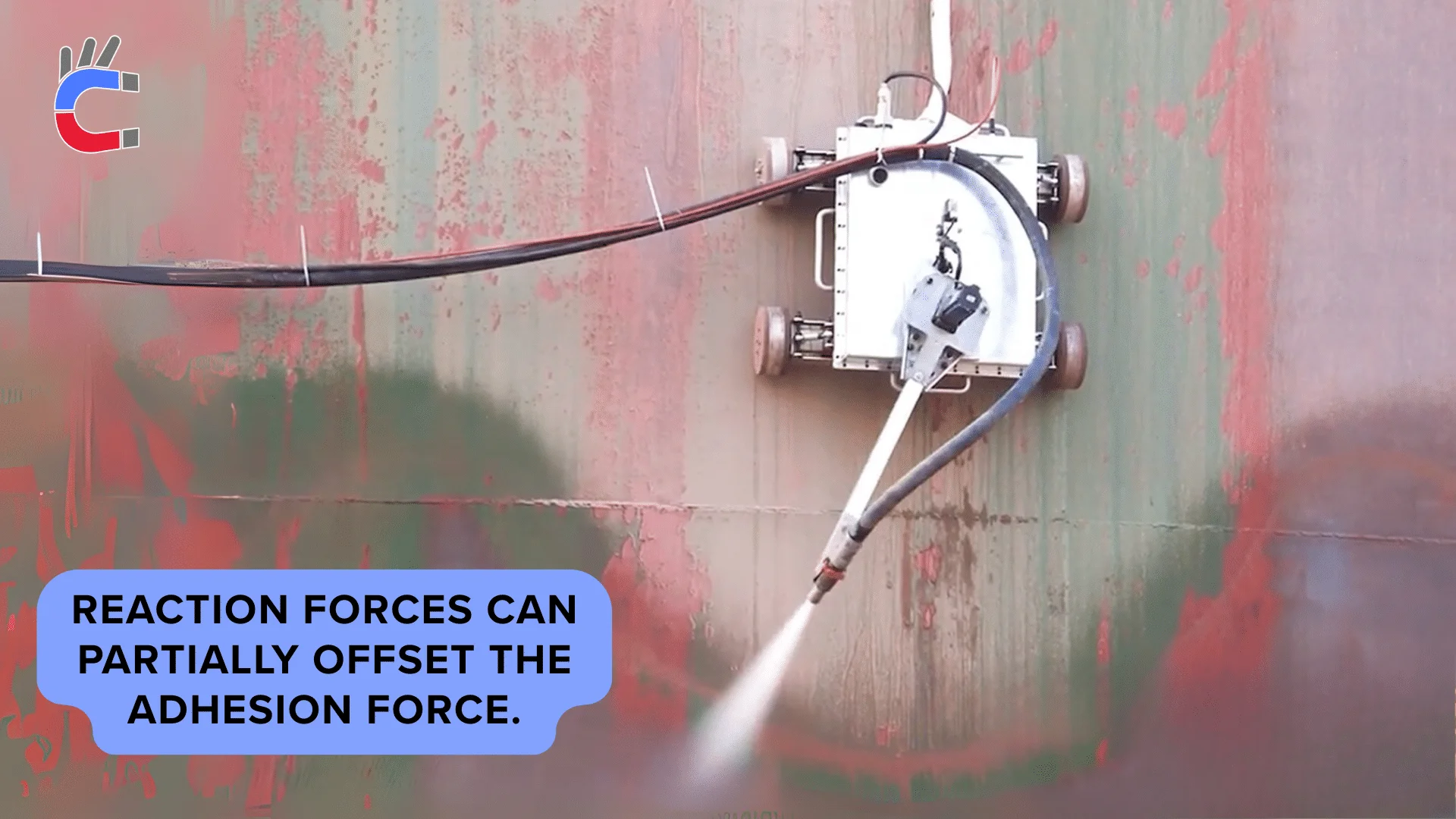
3. Capacidad operativa adicional y consideraciones de carga: Pistolas de agua a alta presión y herramientas de rectificado
Los robots submarinos a menudo necesitan llevar varias herramientas operativas, y el peso de estas herramientas y las fuerzas de reacción generadas durante la operación influyen directamente en la selección de las ruedas magnéticas.
Aumento de carga: Llevar equipos como pistolas de agua a alta presión, herramientas de rectificado, cepillos o matrices de sensores aumenta significativamente el peso total del robot. La capacidad de carga de la rueda magnética debe poder soportar el peso del cuerpo del robot, el peso de todas las herramientas transportadas y el empuje o tracción adicional generado durante la operación de la herramienta.
Fuerzas de reacción operativa: Especialmente cuando se utilizan pistolas de agua a alta presión o herramientas de rectificado, se generan fuertes fuerzas de reacción que intentan empujar o tirar del robot lejos de la superficie adherida. La fuerza de adhesión de la rueda magnética debe ser mucho mayor que estas fuerzas de reacción para garantizar que el robot permanezca establemente unido a la superficie y complete su tarea.
Consumo de energía y duración de la batería: Las operaciones adicionales no solo aumentan el peso, sino que también suelen significar un mayor consumo de energía. Esto afecta la resistencia de la batería del robot y debe equilibrarse durante el diseño del sistema.
4. Diseño de flotabilidad: ¿Flotabilidad positiva o negativa?
Las características de flotabilidad del robot impactan significativamente su movimiento submarino y métodos operativos, que están indirectamente relacionados con la selección de ruedas magnéticas.
Flotabilidad positiva: Significa que el robot flotará naturalmente en el agua.
- Ventajas: Si se pierde energía o adhesión, el robot flota automáticamente a la superficie, facilitando la recuperación y reduciendo el riesgo de pérdida.
- Escenarios de aplicación: Adecuado para robots que no requieren adhesión a largo plazo o fuerte a estructuras submarinas, o cuando se necesita una superficie rápida después de las operaciones.
- Impacto en ruedas magnéticas: Si un robot con flotabilidad positiva necesita realizar operaciones de adhesión en el fondo o las paredes laterales de una estructura submarina, las ruedas magnéticas deberán proporcionar una mayor adhesión hacia arriba o lateral para contrarrestar la flotabilidad.
Flotabilidad negativa: Significa que el robot se hundirá naturalmente en el agua.
- Ventajas: El robot puede descender de manera más estable a la profundidad objetivo y confiar en su propio peso para ayudar a la adhesión a la parte superior o paredes laterales de estructuras submarinas, reduciendo la fuerza de adhesión requerida de las ruedas magnéticas.
- Escenarios de aplicación: Adecuado para robots que requieren operación a largo plazo en estructuras submarinas, o para topografía y mantenimiento en entornos de aguas profundas.
- Impacto en ruedas magnéticas: La flotabilidad negativa ayuda al robot a "presionar" sobre la superficie adherida. El papel principal de las ruedas magnéticas es proporcionar fricción lateral para el movimiento y suficiente adhesión cuando está inclinado o invertido.
Flotabilidad neutra: Idealmente, muchos robots submarinos están diseñados para flotabilidad neutra, lo que significa que ni flotan ni se hunden en el agua. Esto minimiza la flotabilidad o gravedad que el robot necesita superar durante el movimiento submarino, reduciendo así la carga sobre los propulsores o ruedas magnéticas y mejorando la eficiencia energética y la maniobrabilidad.
- Cómo lograrlo: Típicamente se logra ajustando el lastre del robot y los materiales flotantes (p. ej., módulos de flotabilidad).
Resumen: El diseño de flotabilidad influye directamente en la necesidad del robot de adhesión de la rueda magnética. Los robots con flotabilidad positiva requieren más adhesión de las ruedas magnéticas para superar la flotabilidad, mientras que los robots con flotabilidad negativa pueden utilizar la gravedad para ayudar a la adhesión.

5. Capacidad de carga de la rueda magnética: Cálculo y margen
La capacidad de carga de las ruedas magnéticas es un indicador crítico de su capacidad para soportar el robot y su equipo de misión.
Cálculo de carga total: La capacidad de carga total de las ruedas magnéticas debe cubrir los siguientes pesos:
- Peso del cuerpo del robot: Este es el peso fundamental.
- Peso del equipo y herramientas transportados: Incluye sensores, cámaras, manipuladores, herramientas de limpieza, etc.
- Peso propio de la rueda magnética: Para ruedas magnéticas de mayor diámetro, su propio peso no debe pasarse por alto y debe incluirse en la carga total.

Sin categorizar
Permitir margen de seguridad: En aplicaciones prácticas, debido a factores como superficies irregulares, incrustaciones e impacto de la corriente de agua, la fuerza de adhesión real puede disminuir. Por lo tanto, al seleccionar ruedas magnéticas, su capacidad de carga nominal debe ser significativamente mayor que el peso total calculado teóricamente, recomendando típicamente un margen de seguridad del 20% al 50% o incluso mayor. Esto significa que si su robot pesa 100kg, es posible que necesite seleccionar ruedas magnéticas con una fuerza de adhesión de 120kg-150kg o incluso mayor.
6. Fricción y carga del motor: El núcleo de la propulsión
La fricción de las ruedas magnéticas afecta directamente la movilidad del robot y determina la potencia del motor requerida.
Fricción y adhesión: La fuerza de fricción (Ffricción) está relacionada con la fuerza de adhesión de la rueda magnética (Fadhesión) y el coeficiente de fricción (μ) entre las superficies de contacto: Ffricción=μ×Fadhesión. Se necesita un coeficiente de fricción más alto y una fuerza de adhesión suficientemente grande para proporcionar suficiente fricción para garantizar un movimiento submarino estable, especialmente en superficies inclinadas o verticales.
Potencia del motor: Si el peso total del robot (incluidas todas las cargas) es significativo, o si necesita superar una gran resistencia a la corriente de agua o bioincrustaciones, entonces se requerirá un motor de accionamiento más potente para que el robot se mueva de manera eficiente. Una potencia del motor insuficiente puede provocar un movimiento lento, dificultad para escalar o incluso incapacidad para moverse.
Eficiencia energética y gestión térmica: Los motores de alta potencia significan un mayor consumo de energía, lo que requiere paquetes de baterías correspondientes. También se deben hacer consideraciones para la disipación de calor del motor bajo el agua para evitar que el sobrecalentamiento afecte el rendimiento y la vida útil.

Otros factores a considerar
Además de los factores centrales mencionados anteriormente, también vale la pena considerar los siguientes puntos al seleccionar ruedas magnéticas para robots submarinos:
- Tamaño y peso: El tamaño y el peso de las ruedas magnéticas afectarán el diseño general del robot, la maniobrabilidad y la facilidad de despliegue y recuperación. Al tiempo que se cumplen los requisitos de adhesión, se debe priorizar un diseño compacto y ligero.
- Mantenimiento y vida útil: Considere la facilidad de mantenimiento y la vida útil esperada de las ruedas magnéticas. Algunos diseños pueden ser más fáciles de reemplazar piezas desgastadas o realizar mantenimiento regular.
- Costo: El costo es un factor inevitable en cualquier proyecto. Elija la solución más rentable que cumpla con todos los requisitos de rendimiento.
- Personalización: Algunas aplicaciones especiales pueden requerir soluciones de ruedas magnéticas personalizadas, como tamaños específicos, fuerzas de adhesión o integración de otras funciones (p. ej., sensores).
- Impacto de la corriente de agua: Los robots submarinos a menudo están sujetos a corrientes de agua, especialmente en fuertes corrientes oceánicas o cerca de estructuras submarinas. La fuerza de adhesión de la rueda magnética y el diseño aerodinámico general del robot deben considerar cómo resistir eficazmente el empuje de las corrientes de agua.
Al considerar exhaustivamente los factores anteriores, podrá seleccionar las ruedas magnéticas más adecuadas y confiables para su robot submarino, asegurando así su finalización eficiente y segura de diversas tareas en entornos submarinos complejos.