
 English
English Русский
Русский Español
Español Français
Français 한국어
한국어 日本語
日本語
Unterwasserroboter (ROVs oder AUVs) spielen bei Unterwasseroperationen eine immer wichtigere Rolle. Ihre Fähigkeit, Aufgaben effizient und stabil auszuführen, hängt weitgehend von der Leistung ihrer Kernkomponenten ab. Für Unterwasserroboter, die sich auf metallischen Oberflächen bewegen müssen, ist die Wahl der Magneträder entscheidend. Dieser Artikel befasst sich mit den Schlüsselfaktoren, die bei der Auswahl von Magneträdern für Unterwasserroboter zu berücksichtigen sind, und hilft Ihnen, eine fundierte Entscheidung zu treffen.
1. Wasserdichtigkeit, Korrosionsbeständigkeit und Abdichtung: Die Härte der Unterwasserumgebung
Die Unterwasserumgebung unterscheidet sich stark von der an Land. Hoher Druck und korrosive Medien (wie Salze und verschiedene Mikroorganismen im Meerwasser) stellen extrem hohe Anforderungen an die Wasserdichtigkeit und Korrosionsbeständigkeit der Ausrüstung.
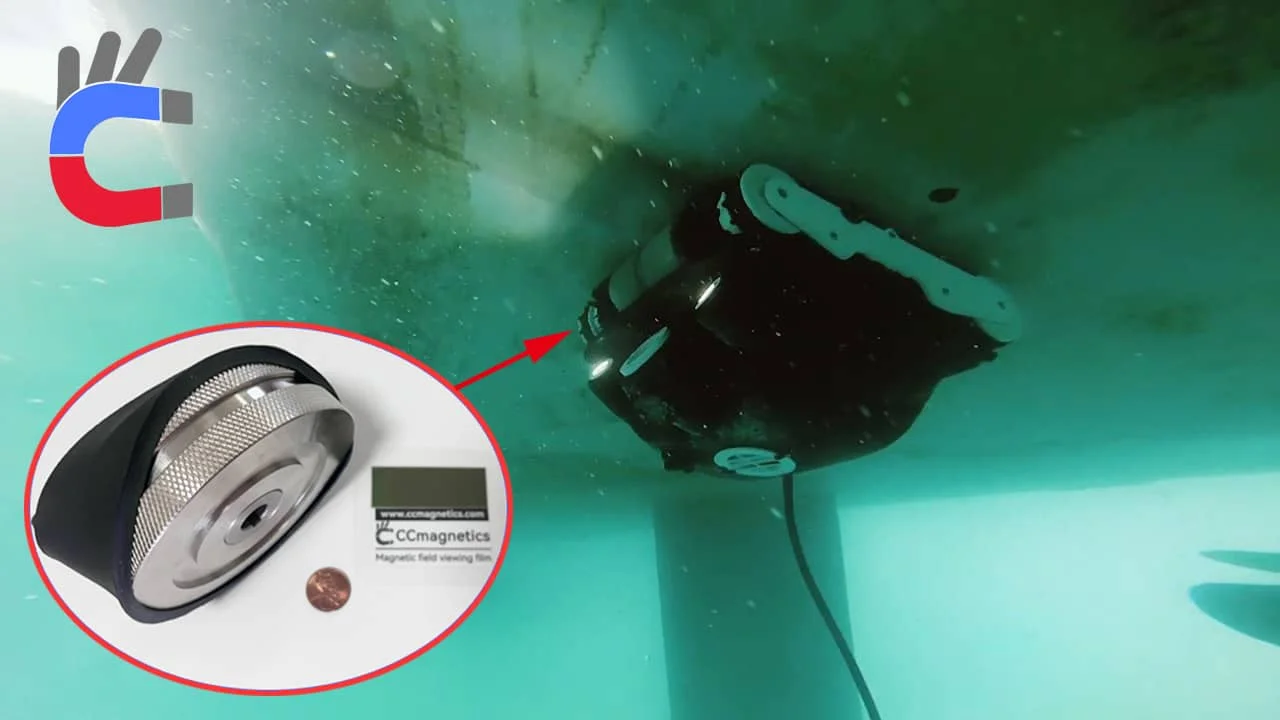
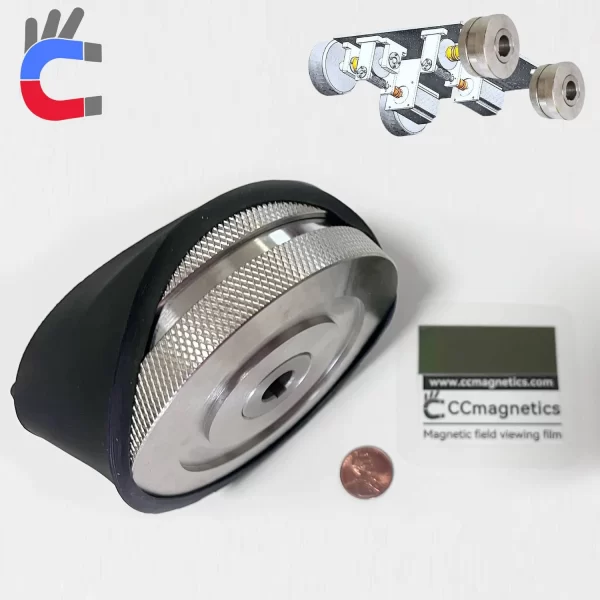
Vollständig abgedichtetes Strukturdesign: Dies ist die grundlegendste und wichtigste Anforderung an Unterwasser-Magneträder. Die magnetischen Materialien und mechanischen Komponenten im Inneren des Magnetrades müssen vollständig vom Wasser isoliert sein, um ein Eindringen zu verhindern, was zu Korrosion, Kurzschlüssen oder mechanischem Versagen führen könnte. Techniken wie O-Ringe, Ferrofluid-Dichtungen oder geschweißte Dichtungen werden häufig verwendet, um eine hochwertige Wasserdichtigkeit zu erreichen.
Materialauswahl: Das Außengehäuse und die internen Komponenten des Magnetrades sollten aus korrosionsbeständigen Materialien bestehen, wie z. B. Edelstahl (insbesondere Edelstahl 316L in Marinequalität), Titanlegierung oder technischen Kunststoffen. Was die Magnete selbst betrifft, so bieten Permanentmagnete (wie Neodym-Eisen-Bor) zwar eine starke Magnetkraft, sind jedoch in feuchten Umgebungen sehr anfällig für Oxidation. Daher sind spezielle Korrosionsschutzbehandlungen unerlässlich, wie z. B. Epoxidharzverkapselung, Nickel-Kupfer-Nickel (Ni-Cu-Ni) Galvanisierung oder Polymerbeschichtungen.
Magnetkraft und Penetration: Die Unterwasserumgebung beeinflusst die Penetration der Magnetkraft nicht von Natur aus. Die Stärke der Magnetkraft hängt von der Leistung des Magneten und dem Design des Magnetkreises ab. Unterwasser-Magneträder müssen jedoch möglicherweise mit Rumpfoberflächen umgehen, die von Biofouling (z. B. Seepocken, Algen) oder Beschichtungen bedeckt sind. Diese Medien vergrößern den Abstand zwischen dem Magnetfeld und der Metalloberfläche und schwächen dadurch die effektive Haftung. Daher werden Magneträder mit ausreichend starker Magnetkraft benötigt, um diese Lücken zu überwinden.
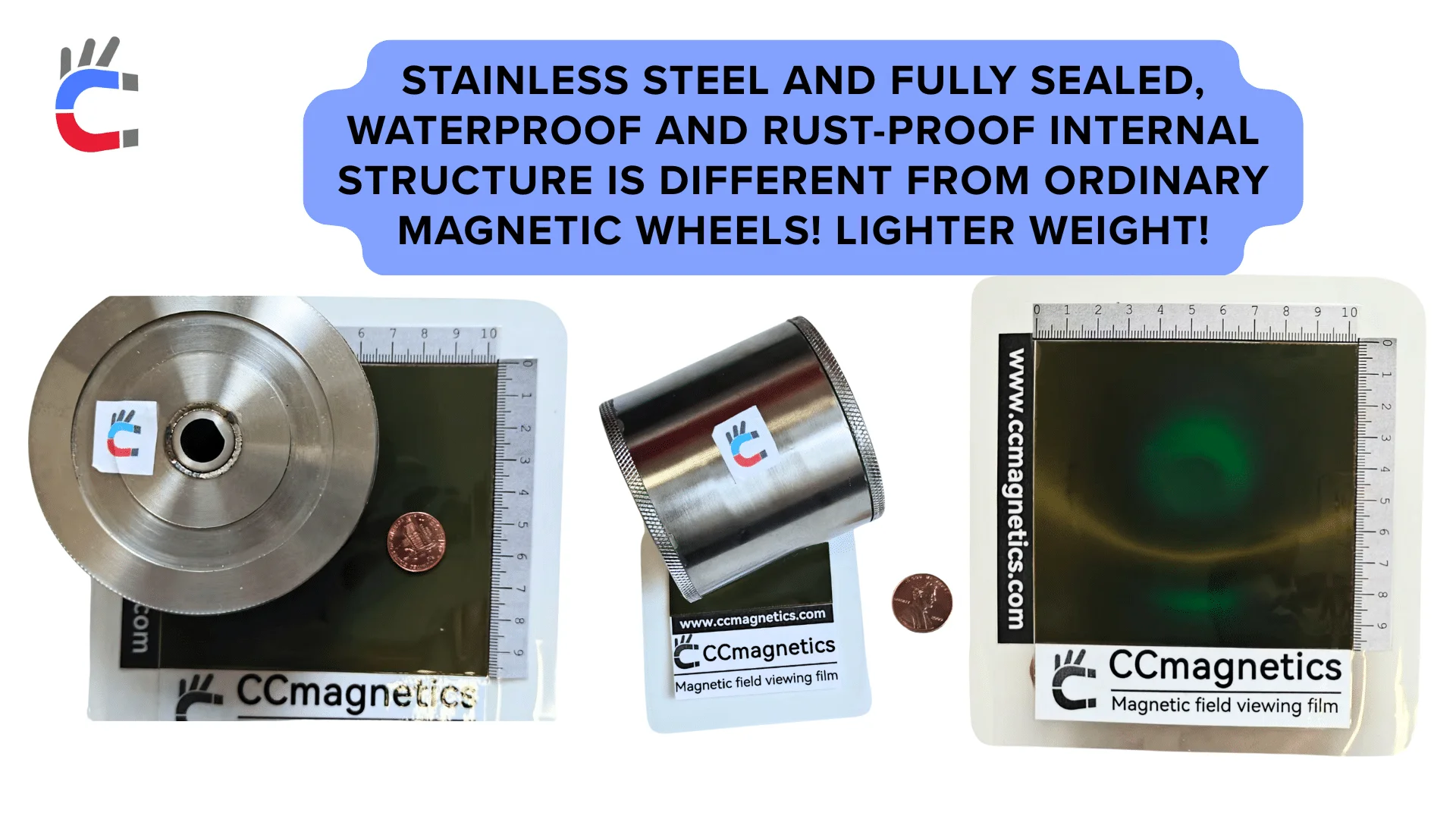

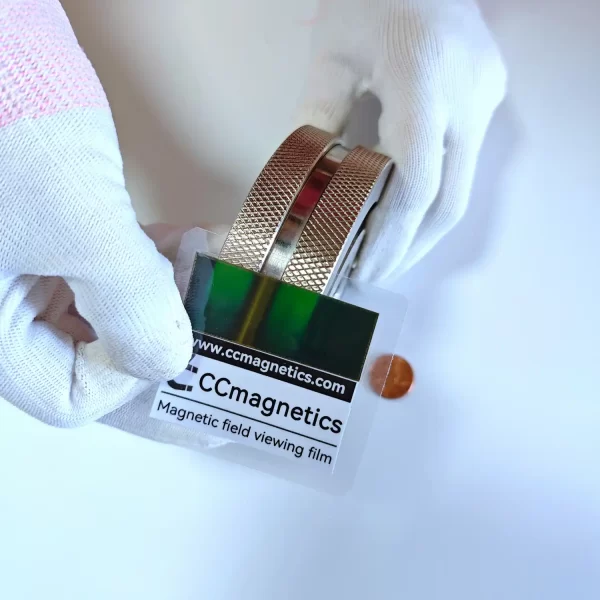
Magnetische Übertragung
2. Schutzgummihülsen: Vermeidung von Rumpfkratzern
Ob eine Gummischutzhülle installiert werden soll oder nicht, hängt vom Anwendungsszenario und den Anforderungen an die Oberfläche des zu inspizierenden Objekts ab.
Schutz des Rumpfanstrichs: Für Roboter, die an Rumpf-, Rohr- oder anderen beschichteten Oberflächen haften und diese inspizieren oder reinigen müssen, ist das Hinzufügen von verschleißfesten Gummihülsen entscheidend. Gummihülsen können die Reibung effektiv erhöhen und verhindern, dass die Magneträder direkt mit der Rumpfoberfläche in Kontakt kommen und Kratzer verursachen, insbesondere bei hochwertigen oder leicht zu beschädigenden Beschichtungen.
Erhöhung der Reibung: Gummihülsen erhöhen auch den Reibungskoeffizienten zwischen dem Magnetrad und der Kontaktfläche erheblich, wodurch der Halt des Roboters auf rutschigen oder verschmutzten Oberflächen verbessert und somit die Bewegungsstabilität und Kletterfähigkeit erhöht wird.
Material und Haltbarkeit: Das Material der Gummihülse sollte eine gute Verschleißfestigkeit, Korrosionsbeständigkeit, UV-Beständigkeit und Alterungsbeständigkeit aufweisen, um dem langfristigen Einsatz in der Unterwasserumgebung standzuhalten.

3. Zusätzliche Betriebsfähigkeit und Lastüberlegungen: Hochdruckwasserpistolen und Schleifwerkzeuge
Unterwasserroboter müssen oft verschiedene Arbeitswerkzeuge tragen, und das Gewicht dieser Werkzeuge sowie die während des Betriebs erzeugten Reaktionskräfte beeinflussen direkt die Auswahl der Magneträder.
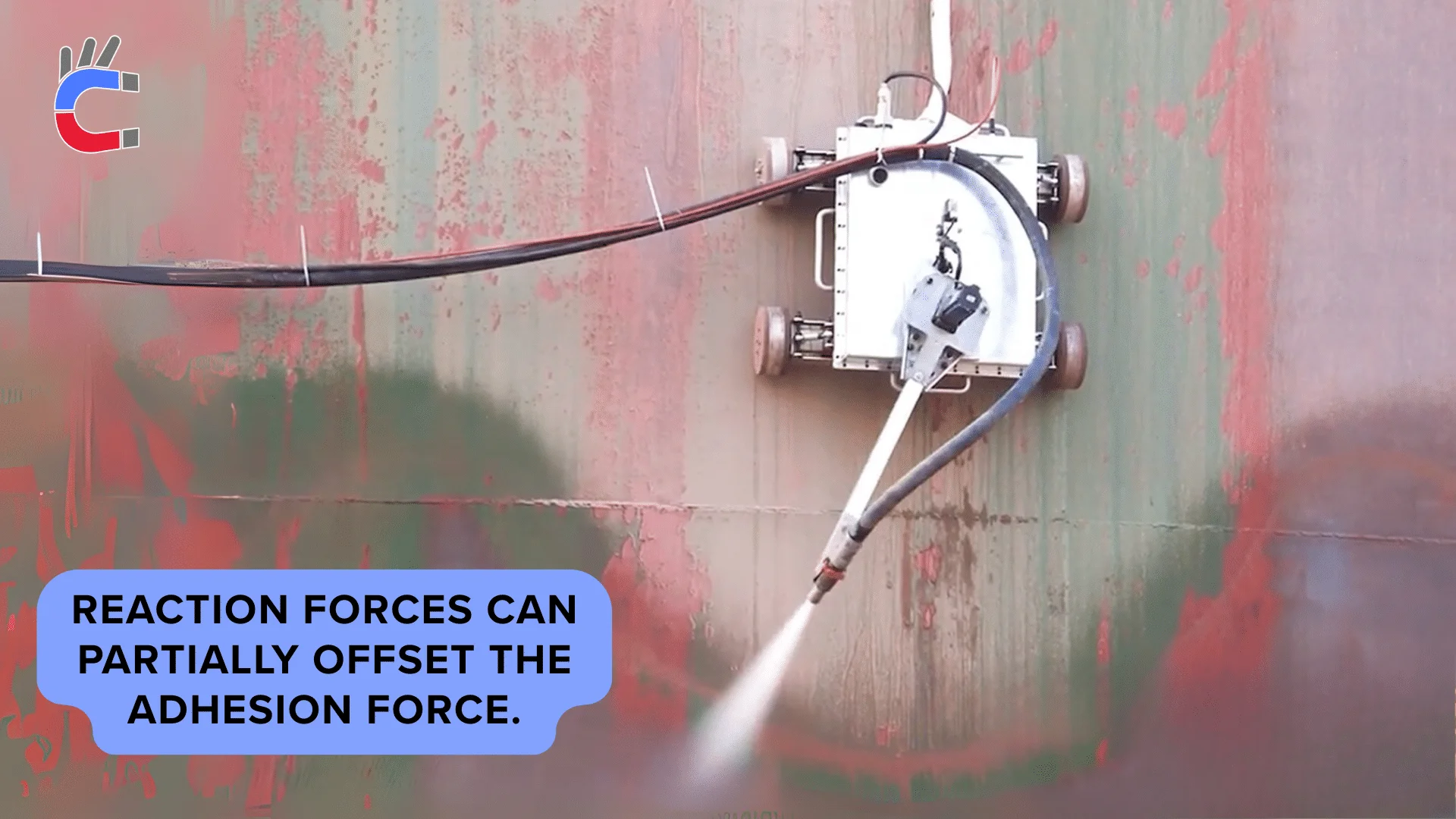
Erhöhte Last: Das Mitführen von Ausrüstung wie Hochdruckwasserpistolen, Schleifwerkzeugen, Bürsten oder Sensorarrays erhöht das Gesamtgewicht des Roboters erheblich. Die Tragfähigkeit des Magnetrades muss das Körpergewicht des Roboters, das Gewicht aller mitgeführten Werkzeuge und den zusätzlichen Schub oder Zug, der während des Werkzeugbetriebs erzeugt wird, tragen können.
Betriebsreaktionskräfte: Insbesondere beim Einsatz von Hochdruckwasserpistolen oder Schleifwerkzeugen entstehen starke Reaktionskräfte, die versuchen, den Roboter von der Haftfläche wegzudrücken oder wegzuziehen. Die Haftkraft des Magnetrades muss viel größer sein als diese Reaktionskräfte, um sicherzustellen, dass der Roboter stabil an der Oberfläche befestigt bleibt und seine Aufgabe erfüllt.
Stromverbrauch und Batterielebensdauer: Zusätzliche Operationen erhöhen nicht nur das Gewicht, sondern bedeuten in der Regel auch einen höheren Energieverbrauch. Dies wirkt sich auf die Batterieausdauer des Roboters aus und muss bei der Systemauslegung abgewogen werden.
4. Auftriebsdesign: Positiver oder negativer Auftrieb?
Die Auftriebseigenschaften des Roboters haben einen erheblichen Einfluss auf seine Unterwasserbewegung und die Betriebsmethoden, die indirekt mit der Auswahl der Magneträder zusammenhängen.
Positiver Auftrieb: Bedeutet, dass der Roboter natürlich im Wasser schwimmt.
- Vorteile: Bei Verlust von Energie oder Haftung schwimmt der Roboter automatisch an die Oberfläche, was die Bergung erleichtert und das Verlustrisiko verringert.
- Anwendungsszenarien: Geeignet für Roboter, die keine langfristige oder starke Haftung an Unterwasserstrukturen benötigen, oder wenn nach Operationen ein schnelles Auftauchen erforderlich ist.
- Auswirkung auf Magneträder: Wenn ein Roboter mit positivem Auftrieb Haftoperationen am Boden oder an den Seitenwänden einer Unterwasserstruktur durchführen muss, müssen die Magneträder eine größere Aufwärts- oder Seitenhaftung bieten, um dem Auftrieb entgegenzuwirken.
Negativer Auftrieb: Bedeutet, dass der Roboter natürlich im Wasser sinkt.
- Vorteile: Der Roboter kann stabiler auf die Zieltiefe absinken und sein Eigengewicht nutzen, um die Haftung an der Oberseite oder den Seitenwänden von Unterwasserstrukturen zu unterstützen, wodurch die von den Magneträdern erforderliche Haftkraft verringert wird.
- Anwendungsszenarien: Geeignet für Roboter, die einen langfristigen Betrieb an Unterwasserstrukturen erfordern, oder für Vermessung und Wartung in Tiefseeumgebungen.
- Auswirkung auf Magneträder: Negativer Auftrieb hilft dem Roboter, sich auf die Haftfläche zu "drücken". Die Hauptrolle der Magneträder besteht darin, seitliche Reibung für die Bewegung und ausreichende Haftung bei Neigung oder Umkehrung bereitzustellen.
Neutraler Auftrieb: Idealerweise sind viele Unterwasserroboter für neutralen Auftrieb ausgelegt, was bedeutet, dass sie im Wasser weder schwimmen noch sinken. Dies minimiert den Auftrieb oder die Schwerkraft, die der Roboter während der Unterwasserbewegung überwinden muss, wodurch die Belastung der Triebwerke oder Magneträder verringert und die Energieeffizienz und Manövrierfähigkeit verbessert werden.
- Erreichung: Typischerweise durch Anpassung des Ballasts und der Auftriebsmaterialien des Roboters (z. B. Auftriebsmodule) erreicht.
Zusammenfassung: Das Auftriebsdesign beeinflusst direkt den Bedarf des Roboters an Magnetradhaftung. Roboter mit positivem Auftrieb benötigen mehr Haftung von Magneträdern, um den Auftrieb zu überwinden, während Roboter mit negativem Auftrieb die Schwerkraft nutzen können, um die Haftung zu unterstützen.

5. Tragfähigkeit der Magneträder: Berechnung und Marge
Die Tragfähigkeit von Magneträdern ist ein kritischer Indikator für ihre Fähigkeit, den Roboter und seine Missionsausrüstung zu tragen.
Gesamtlastberechnung: Die Gesamttragfähigkeit der Magneträder muss folgende Gewichte abdecken:
- Roboter-Körpergewicht: Dies ist das Grundgewicht.
- Gewicht der mitgeführten Ausrüstung und Werkzeuge: Umfasst Sensoren, Kameras, Manipulatoren, Reinigungswerkzeuge usw.
- Eigengewicht des Magnetrades: Bei Magneträdern mit größerem Durchmesser sollte deren Eigengewicht nicht übersehen und in die Gesamtlast einbezogen werden.

Unkategorisiert
Sicherheitsmarge einplanen: In praktischen Anwendungen kann die tatsächliche Haftkraft aufgrund von Faktoren wie unebenen Oberflächen, Verschmutzung und Einwirkung von Wasserströmungen abnehmen. Daher sollte bei der Auswahl von Magneträdern deren Nennlastkapazität deutlich größer sein als das theoretisch berechnete Gesamtgewicht, wobei typischerweise eine Sicherheitsmarge von 20 % bis 50 % oder sogar höher empfohlen wird. Das bedeutet, wenn Ihr Roboter 100 kg wiegt, müssen Sie möglicherweise Magneträder mit einer Haftkraft von 120 kg bis 150 kg oder sogar höher auswählen.
6. Reibung und Motorlast: Der Kern des Antriebs
Die Reibung der Magneträder beeinflusst direkt die Mobilität des Roboters und bestimmt die erforderliche Motorleistung.
Reibung und Haftung: Die Reibungskraft (F_Reibung) steht im Zusammenhang mit der Haftkraft des Magnetrades (F_Haftung) und dem Reibungskoeffizienten (μ) zwischen den Kontaktflächen: F_Reibung = μ × F_Haftung. Ein höherer Reibungskoeffizient und eine ausreichend große Haftkraft sind erforderlich, um genügend Reibung zu bieten, um eine stabile Unterwasserbewegung zu gewährleisten, insbesondere auf geneigten oder vertikalen Oberflächen.
Motorleistung: Wenn das Gesamtgewicht des Roboters (einschließlich aller Lasten) erheblich ist oder wenn er einen großen Wasserströmungswiderstand oder Biofouling überwinden muss, ist ein leistungsstärkerer Antriebsmotor erforderlich, damit sich der Roboter effizient bewegen kann. Unzureichende Motorleistung kann zu langsamer Bewegung, Schwierigkeiten beim Klettern oder sogar zur Unfähigkeit führen, sich zu bewegen.
Energieeffizienz und Wärmemanagement: Hochleistungsmotoren bedeuten einen höheren Energieverbrauch, was entsprechende Batteriepakete erfordert. Auch die Wärmeableitung des Motors unter Wasser muss berücksichtigt werden, um zu verhindern, dass Überhitzung die Leistung und Lebensdauer beeinträchtigt.

Andere zu berücksichtigende Faktoren
Neben den oben genannten Kernfaktoren sind bei der Auswahl von Magneträdern für Unterwasserroboter auch folgende Punkte zu beachten:
- Größe und Gewicht: Größe und Gewicht der Magneträder beeinflussen das Gesamtdesign des Roboters, die Manövrierfähigkeit sowie die Leichtigkeit des Einsatzes und der Bergung. Während die Haftungsanforderungen erfüllt werden, sollte ein kompaktes und leichtes Design priorisiert werden.
- Wartung und Lebensdauer: Berücksichtigen Sie die Wartungsfreundlichkeit und die erwartete Lebensdauer der Magneträder. Einige Designs können einfacher sein, um verschlissene Teile auszutauschen oder regelmäßige Wartungsarbeiten durchzuführen.
- Kosten: Kosten sind ein unvermeidlicher Faktor in jedem Projekt. Wählen Sie die kostengünstigste Lösung, die alle Leistungsanforderungen erfüllt.
- Anpassbarkeit: Einige spezielle Anwendungen erfordern möglicherweise kundenspezifische Magnetradlösungen, wie z. B. bestimmte Größen, Haftkräfte oder die Integration anderer Funktionen (z. B. Sensoren).
- Einfluss von Wasserströmungen: Unterwasserroboter sind oft Wasserströmungen ausgesetzt, insbesondere in starken Meeresströmungen oder in der Nähe von Unterwasserstrukturen. Die Haftkraft des Magnetrades und das gesamte stromlinienförmige Design des Roboters müssen berücksichtigen, wie dem Schub der Wasserströmungen effektiv widerstanden werden kann.
Durch umfassende Berücksichtigung der oben genannten Faktoren können Sie die am besten geeigneten und zuverlässigsten Magneträder für Ihren Unterwasserroboter auswählen und so die effiziente und sichere Erledigung verschiedener Aufgaben in komplexen Unterwasserumgebungen gewährleisten.