
 English
English Deutsch
Deutsch Русский
Русский Español
Español 한국어
한국어 日本語
日本語
Les robots sous-marins (ROV ou AUV) jouent un rôle de plus en plus vital dans les opérations sous-marines. Leur capacité à effectuer des tâches de manière efficace et stable dépend en grande partie des performances de leurs composants principaux. Pour les robots sous-marins qui doivent se déplacer sur des surfaces métalliques, le choix des roues magnétiques est crucial. Cet article examine les facteurs clés à prendre en compte lors de la sélection de roues magnétiques pour robots sous-marins, vous aidant à prendre une décision éclairée.
1. Étanchéité, résistance à la corrosion et scellement : Les rigueurs de l'environnement sous-marin
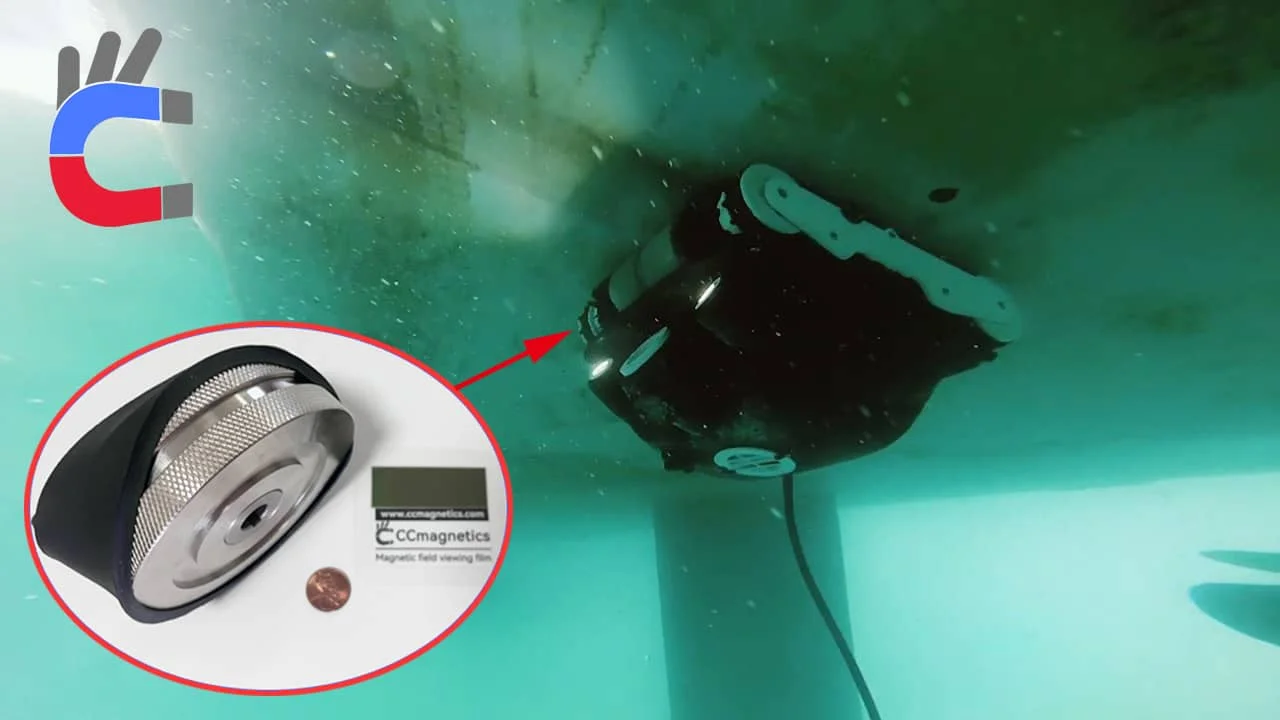
L'environnement sous-marin est très différent de celui sur terre, avec une pression élevée et des milieux corrosifs (tels que les sels et divers micro-organismes dans l'eau de mer) imposant des exigences extrêmement élevées en matière d'étanchéité et de résistance à la corrosion des équipements.
Conception de structure entièrement scellée : C'est l'exigence la plus fondamentale et la plus critique pour les roues magnétiques sous-marines. Les matériaux magnétiques et les composants mécaniques à l'intérieur de la roue magnétique doivent être complètement isolés de l'eau pour empêcher toute pénétration, ce qui pourrait entraîner de la corrosion, des courts-circuits ou une défaillance mécanique. Des techniques comme les joints toriques, les joints ferrofluides ou les joints soudés sont couramment utilisées pour obtenir une étanchéité de haute qualité.
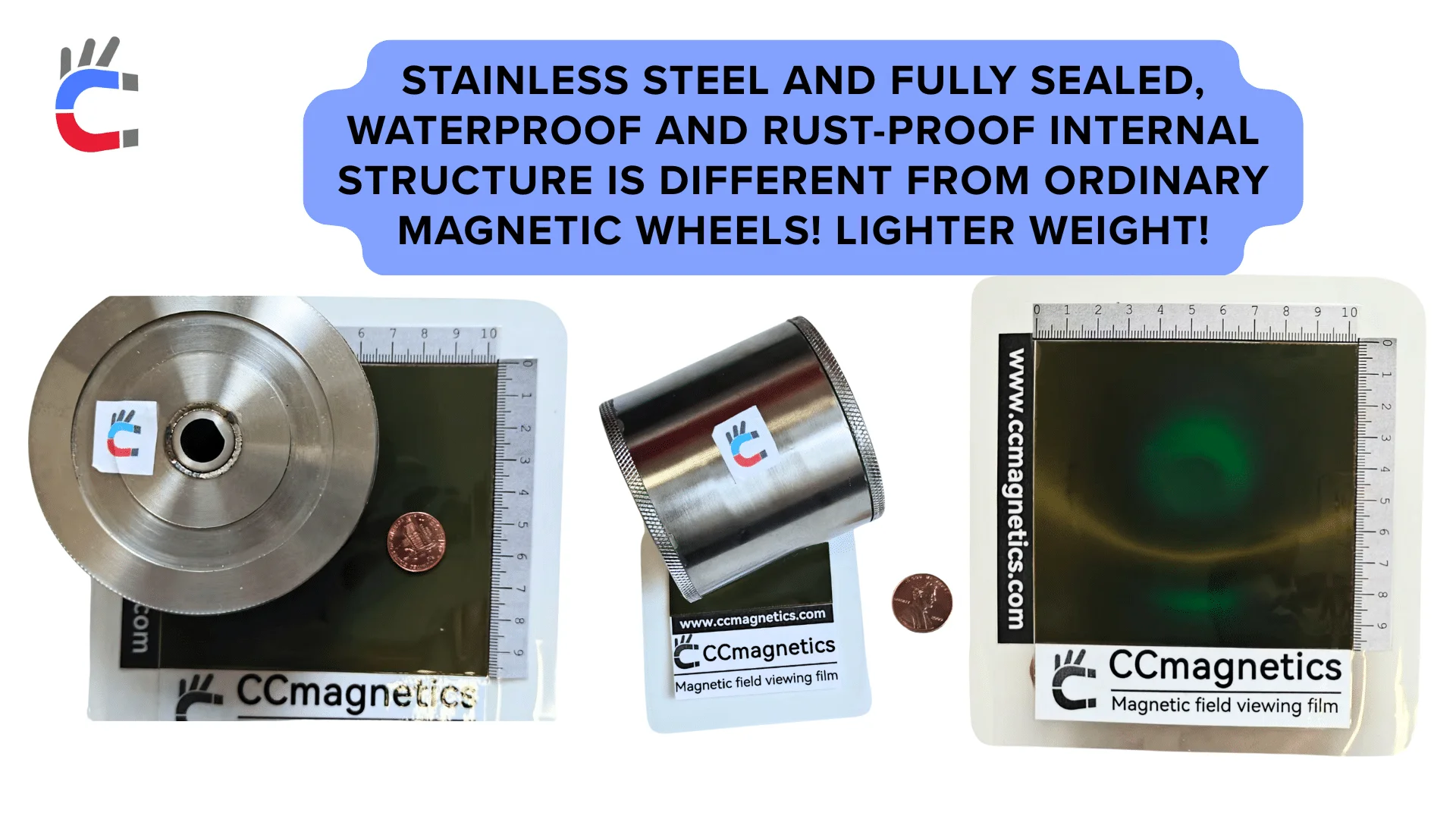
Sélection des matériaux : Le boîtier extérieur et les composants internes de la roue magnétique doivent être fabriqués à partir de matériaux résistants à la corrosion, tels que l'acier inoxydable (en particulier l'acier inoxydable de qualité marine 316L), l'alliage de titane ou les plastiques techniques. Pour les aimants eux-mêmes, bien que les aimants permanents (comme le néodyme-fer-bore) offrent une force magnétique puissante, ils sont très sensibles à l'oxydation dans les environnements humides. Par conséquent, des traitements anti-corrosion spéciaux sont essentiels, tels que l'encapsulation en résine époxy, la galvanoplastie nickel-cuivre-nickel (Ni-Cu-Ni) ou les revêtements polymères.
Force magnétique et pénétration : L'environnement sous-marin n'affecte pas intrinsèquement la pénétration de la force magnétique. La force de la force magnétique dépend des performances de l'aimant et de la conception du circuit magnétique. Cependant, les roues magnétiques sous-marines peuvent avoir à faire face à des surfaces de coque recouvertes de bio-salissures (par exemple, balanes, algues) ou de revêtements. Ces milieux augmentent la distance entre le champ magnétique et la surface métallique, affaiblissant ainsi l'adhérence efficace. Par conséquent, des roues magnétiques avec une force magnétique suffisamment puissante sont nécessaires pour surmonter ces écarts.

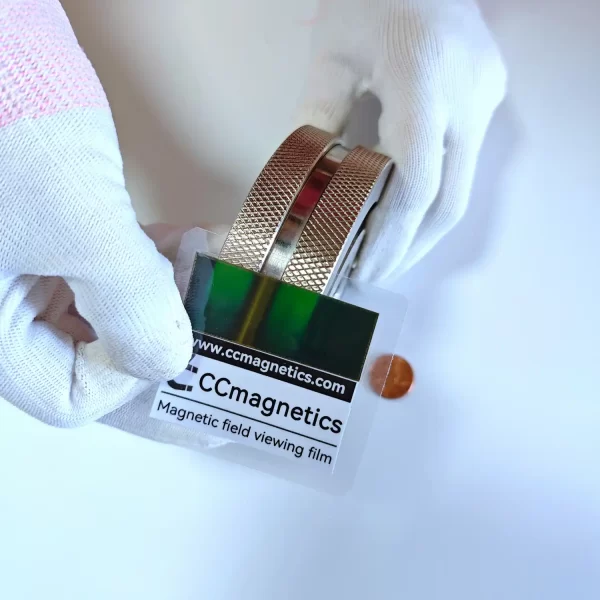
Transmission magnétique
2. Manchons de protection en caoutchouc : Prévention des rayures sur la coque
L'installation ou non d'un manchon en caoutchouc dépend du scénario d'application et des exigences relatives à la surface de l'objet inspecté.
Protection de la peinture de la coque : Pour les robots qui doivent adhérer et inspecter ou nettoyer la coque, les tuyaux ou d'autres surfaces revêtues, l'ajout de manchons en caoutchouc résistants à l'usure est crucial. Les manchons en caoutchouc peuvent augmenter efficacement la friction et empêcher les roues magnétiques d'entrer directement en contact avec la surface de la coque et de provoquer des rayures, en particulier pour les revêtements de grande valeur ou facilement endommagés.
Augmentation de la friction : Les manchons en caoutchouc augmentent également considérablement le coefficient de frottement entre la roue magnétique et la surface de contact, améliorant l'adhérence du robot sur des surfaces glissantes ou encrassées, améliorant ainsi la stabilité de la mobilité et la capacité de grimper.
Matériau et durabilité : Le matériau du manchon en caoutchouc doit posséder une bonne résistance à l'usure, à la corrosion, aux UV et des propriétés anti-vieillissement pour résister à une utilisation à long terme dans l'environnement sous-marin.

3. Capacité opérationnelle supplémentaire et considérations de charge : Pistolets à eau haute pression et outils de meulage
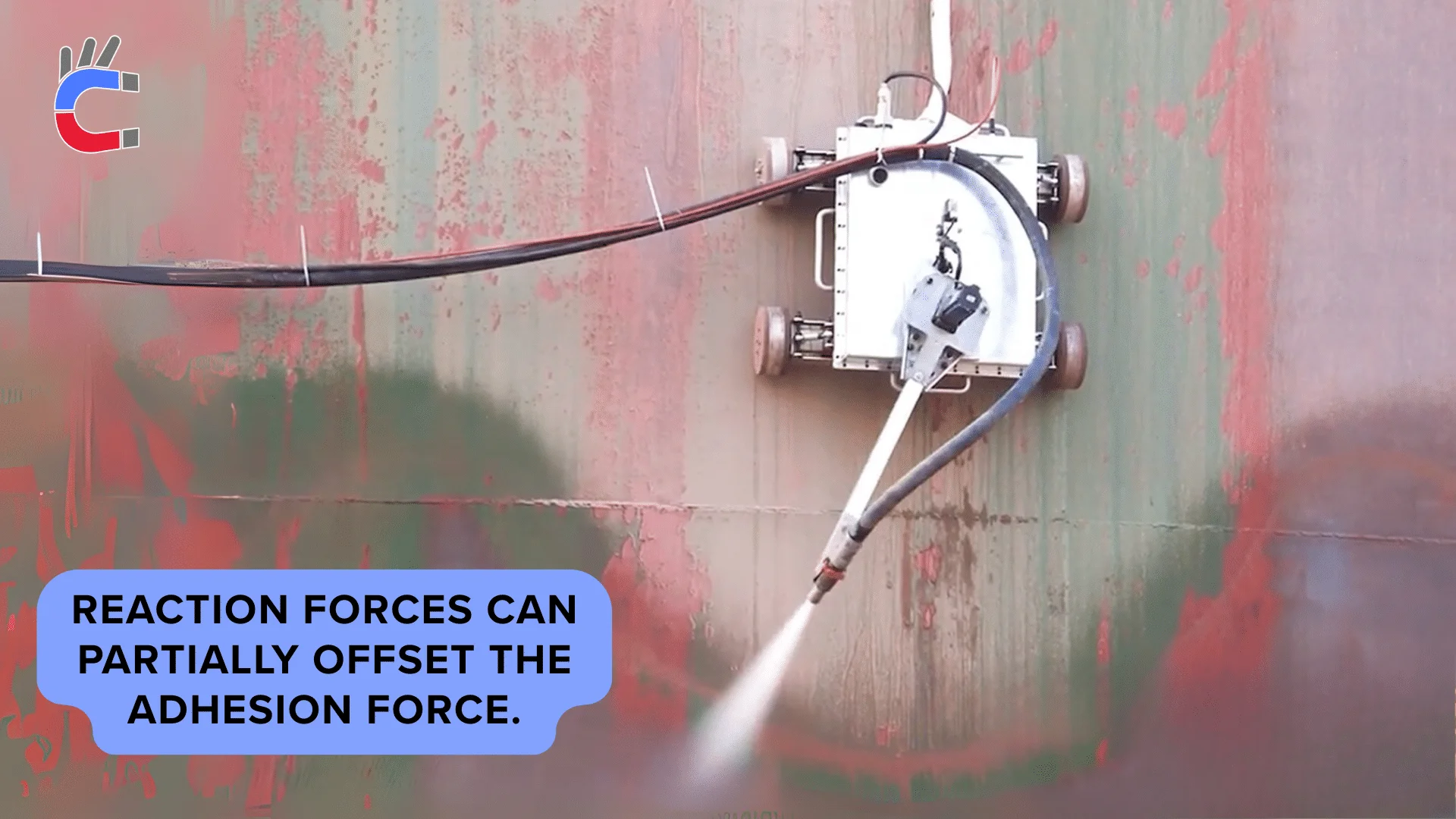
Les robots sous-marins doivent souvent transporter divers outils opérationnels, et le poids de ces outils et les forces de réaction générées pendant l'opération influencent directement la sélection des roues magnétiques.
Charge accrue : Le transport d'équipements tels que des pistolets à eau haute pression, des outils de meulage, des brosses ou des réseaux de capteurs augmente considérablement le poids global du robot. La capacité de charge de la roue magnétique doit être capable de supporter le poids du corps du robot, le poids de tous les outils transportés et la poussée ou la traction supplémentaire générée pendant le fonctionnement de l'outil.
Forces de réaction opérationnelles : Surtout lors de l'utilisation de pistolets à eau haute pression ou d'outils de meulage, de fortes forces de réaction sont générées, qui tentent de pousser ou de tirer le robot loin de la surface collée. La force d'adhérence de la roue magnétique doit être bien supérieure à ces forces de réaction pour garantir que le robot reste attaché de manière stable à la surface et termine sa tâche.
Consommation d'énergie et durée de vie de la batterie : Les opérations supplémentaires augmentent non seulement le poids, mais signifient aussi généralement une consommation d'énergie plus élevée. Cela affecte l'endurance de la batterie du robot et doit être équilibré lors de la conception du système.
4. Conception de la flottabilité : Flottabilité positive ou négative ?
Les caractéristiques de flottabilité du robot ont un impact significatif sur son mouvement sous-marin et ses méthodes opérationnelles, qui sont indirectement liées à la sélection des roues magnétiques.
Flottabilité positive : Signifie que le robot flottera naturellement dans l'eau.
- Avantages : En cas de perte de puissance ou d'adhérence, le robot flotte automatiquement à la surface, facilitant la récupération et réduisant le risque de perte.
- Scénarios d'application : Convient aux robots qui ne nécessitent pas une adhérence à long terme ou forte aux structures sous-marines, ou lorsqu'une remontée rapide est nécessaire après les opérations.
- Impact sur les roues magnétiques : Si un robot à flottabilité positive doit effectuer des opérations d'adhérence sur le fond ou les parois latérales d'une structure sous-marine, les roues magnétiques devront fournir une plus grande adhérence vers le haut ou latérale pour contrer la flottabilité.
Flottabilité négative : Signifie que le robot coulera naturellement dans l'eau.
- Avantages : Le robot peut descendre de manière plus stable à la profondeur cible et compter sur son propre poids pour aider à l'adhérence au sommet ou aux parois latérales des structures sous-marines, réduisant la force d'adhérence requise des roues magnétiques.
- Scénarios d'application : Convient aux robots nécessitant un fonctionnement à long terme sur des structures sous-marines, ou pour l'arpentage et la maintenance dans des environnements en eau profonde.
- Impact sur les roues magnétiques : La flottabilité négative aide le robot à "appuyer" sur la surface collée. Le rôle principal des roues magnétiques est de fournir une friction latérale pour le mouvement et une adhérence suffisante lorsqu'elles sont inclinées ou inversées.
Flottabilité neutre : Idéalement, de nombreux robots sous-marins sont conçus pour une flottabilité neutre, ce qui signifie qu'ils ne flottent ni ne coulent dans l'eau. Cela minimise la flottabilité ou la gravité que le robot doit surmonter lors du mouvement sous-marin, réduisant ainsi la charge sur les propulseurs ou les roues magnétiques et améliorant l'efficacité énergétique et la maniabilité.
- Réalisation : Généralement obtenue en ajustant le lest et les matériaux flottants du robot (par exemple, modules de flottabilité).
Résumé : La conception de la flottabilité influence directement le besoin du robot en adhérence des roues magnétiques. Les robots à flottabilité positive nécessitent plus d'adhérence des roues magnétiques pour surmonter la flottabilité, tandis que les robots à flottabilité négative peuvent utiliser la gravité pour aider à l'adhérence.

5. Capacité de charge de la roue magnétique : Calcul et marge
La capacité de charge des roues magnétiques est un indicateur critique de leur capacité à supporter le robot et son équipement de mission.
Calcul de la charge totale : La capacité de charge totale des roues magnétiques doit couvrir les poids suivants :
- Poids du corps du robot : C'est le poids fondamental.
- Poids de l'équipement et des outils transportés : Comprend les capteurs, les caméras, les manipulateurs, les outils de nettoyage, etc.
- Poids propre de la roue magnétique : Pour les roues magnétiques de plus grand diamètre, leur poids propre ne doit pas être négligé et doit être inclus dans la charge totale.

Prévoir une marge de sécurité : Dans les applications pratiques, en raison de facteurs tels que les surfaces inégales, l'encrassement et l'impact du courant d'eau, la force d'adhérence réelle peut diminuer. Par conséquent, lors de la sélection des roues magnétiques, leur capacité de charge nominale doit être nettement supérieure au poids total calculé théoriquement, recommandant généralement une marge de sécurité de 20 % à 50 % ou même plus. Cela signifie que si votre robot pèse 100 kg, vous devrez peut-être sélectionner des roues magnétiques avec une force d'adhérence de 120 kg à 150 kg ou même plus.
6. Friction et charge du moteur : Le cœur de la propulsion
La friction des roues magnétiques affecte directement la mobilité du robot et détermine la puissance du moteur requise.
Friction et adhérence : La force de frottement (Ffrottement) est liée à la force d'adhérence de la roue magnétique (Fadhérence) et au coefficient de frottement (μ) entre les surfaces de contact : Ffrottement=μ×Fadhérence. Un coefficient de frottement plus élevé et une force d'adhérence suffisamment importante sont nécessaires pour fournir une friction suffisante pour assurer un mouvement sous-marin stable, en particulier sur des surfaces inclinées ou verticales.
Puissance du moteur : Si le poids total du robot (y compris toutes les charges) est important, ou s'il doit surmonter une grande résistance au courant d'eau ou une bio-salissure, alors un moteur d'entraînement plus puissant sera nécessaire pour que le robot se déplace efficacement. Une puissance moteur insuffisante peut entraîner un mouvement lent, des difficultés à grimper ou même une incapacité à se déplacer.
Efficacité énergétique et gestion thermique : Les moteurs haute puissance signifient une consommation d'énergie plus élevée, nécessitant des batteries correspondantes. Des considérations doivent également être prises pour la dissipation thermique du moteur sous l'eau afin d'éviter que la surchauffe n'affecte les performances et la durée de vie.

Autres facteurs à considérer
En plus des facteurs fondamentaux mentionnés ci-dessus, les points suivants méritent également d'être pris en compte lors de la sélection de roues magnétiques pour robots sous-marins :
- Taille et poids : La taille et le poids des roues magnétiques affecteront la conception globale du robot, sa maniabilité et la facilité de déploiement et de récupération. Tout en répondant aux exigences d'adhérence, une conception compacte et légère doit être privilégiée.
- Maintenance et durée de vie : Tenez compte de la facilité de maintenance et de la durée de vie prévue des roues magnétiques. Certaines conceptions peuvent être plus faciles pour remplacer les pièces usées ou effectuer une maintenance régulière.
- Coût : Le coût est un facteur inévitable dans tout projet. Choisissez la solution la plus rentable qui répond à toutes les exigences de performance.
- Personnalisabilité : Certaines applications spéciales peuvent nécessiter des solutions de roues magnétiques personnalisées, telles que des tailles spécifiques, des forces d'adhérence ou l'intégration d'autres fonctions (par exemple, des capteurs).
- Impact du courant d'eau : Les robots sous-marins sont souvent soumis aux courants d'eau, en particulier dans les forts courants océaniques ou à proximité de structures sous-marines. La force d'adhérence de la roue magnétique et la conception aérodynamique globale du robot doivent prendre en compte la manière de résister efficacement à la poussée des courants d'eau.
En considérant globalement les facteurs ci-dessus, vous serez en mesure de sélectionner les roues magnétiques les plus appropriées et les plus fiables pour votre robot sous-marin, assurant ainsi son achèvement efficace et sûr de diverses tâches dans des environnements sous-marins complexes.