
 English
English Deutsch
Deutsch Русский
Русский Español
Español Français
Français 한국어
한국어
水中ロボット(ROVまたはAUV)は、海底作業においてますます重要な役割を果たしています。タスクを効率的かつ安定して実行できるかどうかは、主にコアコンポーネントの性能に依存します。金属表面を移動する必要がある水中ロボットにとって、マグネットホイールの選択は極めて重要です。この記事では、水中ロボット用のマグネットホイールを選択する際に考慮すべき重要な要素を掘り下げ、情報に基づいた決定を下すのに役立ちます。
1. 防水、耐食性、および密閉:水中環境の厳しさ
水中環境は陸上とは大きく異なり、高圧や腐食性媒体(塩分や海水中のさまざまな微生物など)が、機器の防水性と耐食性に極めて高い要求を課します。
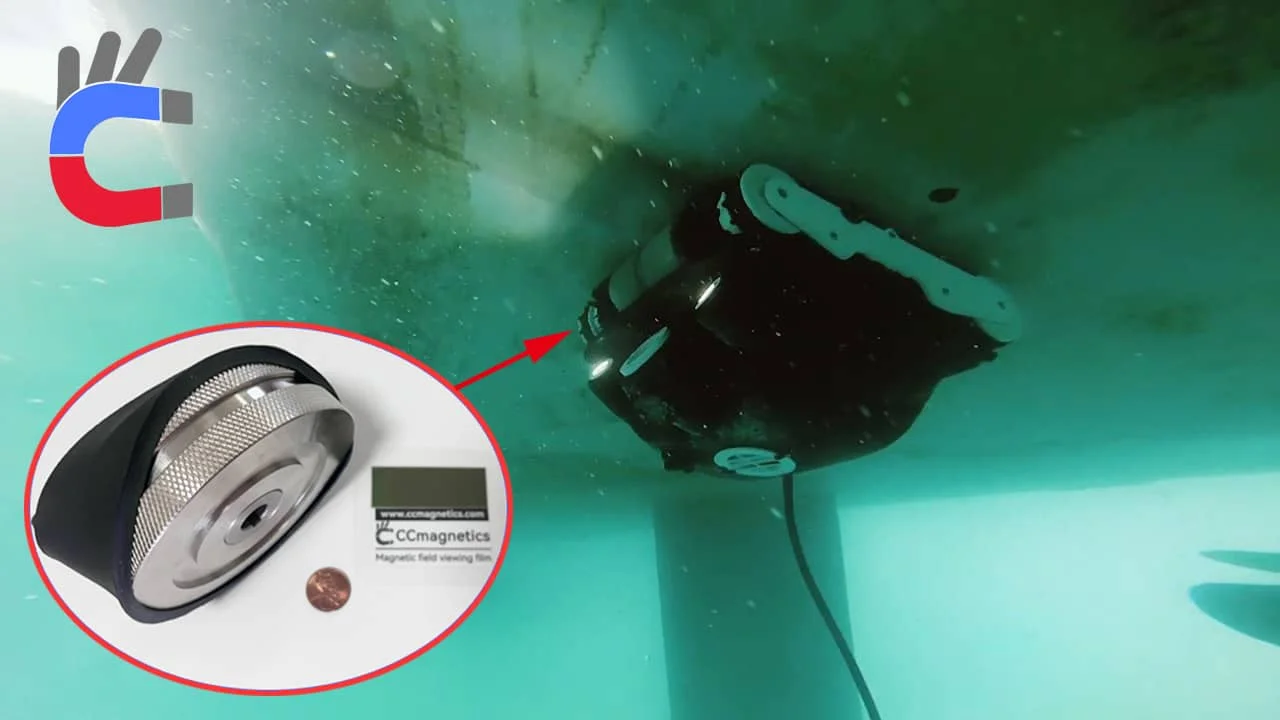
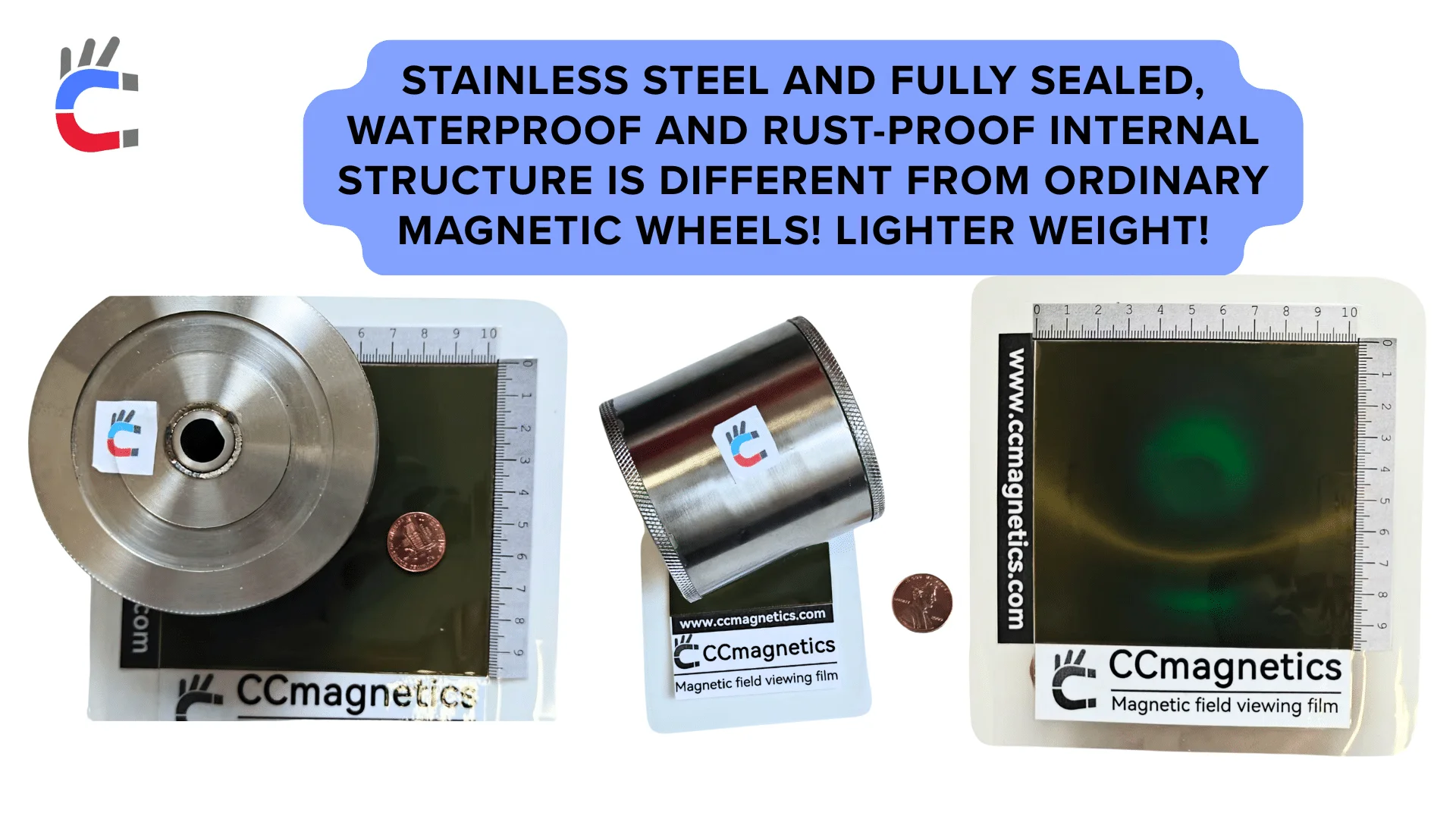
完全密閉構造設計: これは水中用マグネットホイールの最も基本的かつ重要な要件です。マグネットホイール内部の磁性材料や機械部品は、腐食、短絡、または機械的故障につながる可能性のある水の浸入を防ぐために、水から完全に隔離する必要があります。高度な防水を実現するために、Oリング、磁性流体シール、または溶接シールなどの技術が一般的に使用されます。
材料の選択: マグネットホイールの外装および内部コンポーネントは、ステンレス鋼(特に316Lマリングレードステンレス鋼)、チタン合金、またはエンジニアリングプラスチックなどの耐食性材料で作られている必要があります。磁石自体については、永久磁石(ネオジム鉄ホウ素など)は強力な磁力を提供しますが、湿った環境では非常に酸化しやすくなります。したがって、エポキシ樹脂封止、ニッケル-銅-ニッケル(Ni-Cu-Ni)電気メッキ、またはポリマーコーティングなどの特別な防食処理が不可欠です。
磁力と透過性: 水中環境は本質的に磁力の透過に影響を与えません。磁力の強さは、磁石の性能と磁気回路の設計に依存します。ただし、水中用マグネットホイールは、生物付着(フジツボ、藻類など)やコーティングで覆われた船体表面に対処する必要がある場合があります。これらの媒体は磁場と金属表面の間の距離を広げ、それによって有効な吸着力を弱めます。したがって、これらのギャップを克服するために十分に強力な磁力を持つマグネットホイールが必要です。

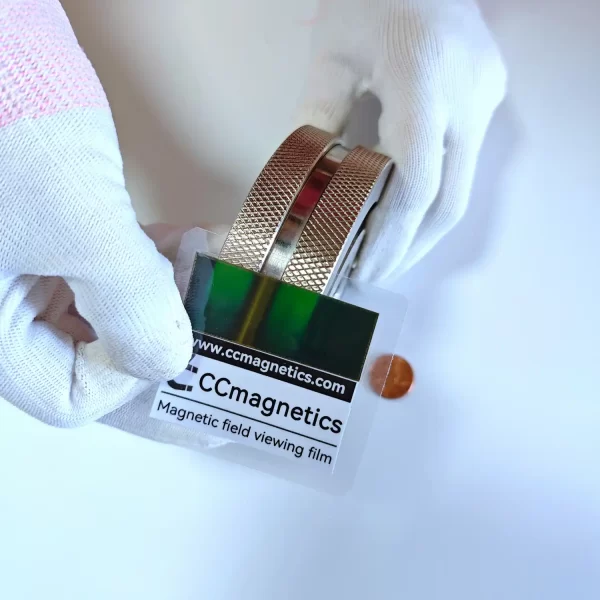
磁気伝送
2. 保護用ゴムスリーブ:船体の傷防止
ゴムスリーブを取り付けるかどうかは、アプリケーションのシナリオと、検査対象物の表面に対する要件によって異なります。
船体塗装の保護: 船体、パイプ、またはその他のコーティングされた表面に吸着して検査または清掃を行う必要があるロボットの場合、耐摩耗性のあるゴムスリーブを追加することが重要です。ゴムスリーブは摩擦を効果的に高め、マグネットホイールが船体表面に直接接触して傷を付けるのを防ぎます。特に高価なコーティングや損傷しやすいコーティングの場合に有効です。
摩擦の増加: ゴムスリーブはまた、マグネットホイールと接触面の間の摩擦係数を大幅に高め、滑りやすい表面や汚れた表面でのロボットのグリップを向上させ、それによって移動の安定性と登坂能力を強化します。
材料と耐久性: ゴムスリーブの材料は、水中環境での長期使用に耐えるために、優れた耐摩耗性、耐食性、耐紫外線性、および耐老化性を備えている必要があります。

3. 追加の作業能力と負荷の考慮:高圧水鉄砲と研削ツール
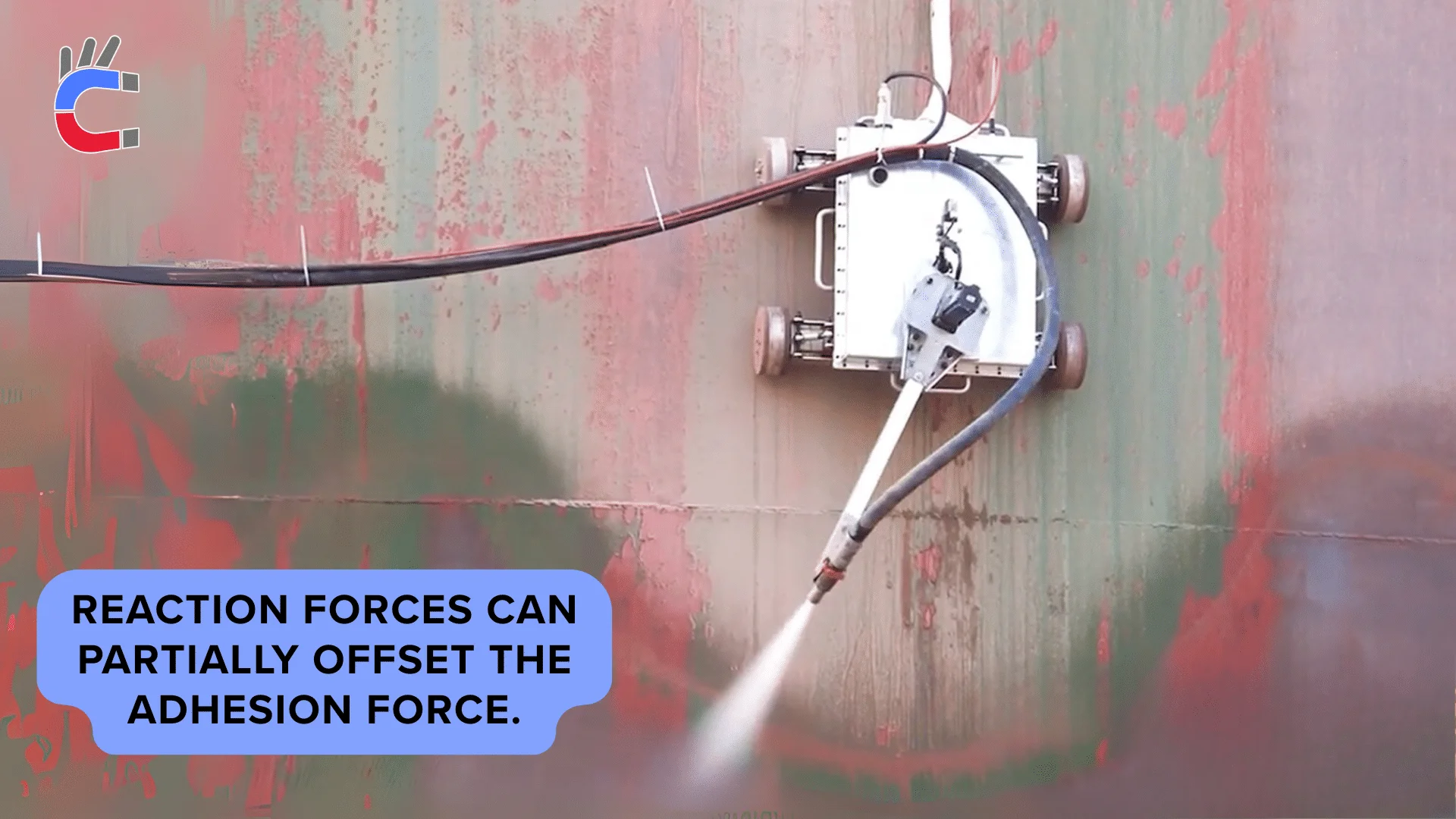
水中ロボットは、さまざまな作業ツールを携帯する必要がある場合が多く、これらのツールの重量と作業中に発生する反力は、マグネットホイールの選択に直接影響します。
負荷の増加: 高圧水鉄砲、研削ツール、ブラシ、またはセンサーアレイなどの機器を搭載すると、ロボットの総重量が大幅に増加します。マグネットホイールの耐荷重能力は、ロボットの本体重量、搭載されたすべてのツールの重量、およびツール操作中に発生する追加の推力または引張力に耐えることができなければなりません。
作業反力: 特に高圧水鉄砲や研削ツールを使用する場合、強力な反力が発生し、ロボットを吸着面から押し離そうとしたり、引っ張ったりします。マグネットホイールの吸着力は、ロボットが表面に安定して付着し、タスクを完了できるように、これらの反力よりもはるかに大きくなければなりません。
消費電力とバッテリー寿命: 追加の作業は重量を増やすだけでなく、通常、より高いエネルギー消費も意味します。これはロボットのバッテリー持続時間に影響を与え、システム設計時にバランスを取る必要があります。
4. 浮力設計:正浮力か負浮力か?
ロボットの浮力特性は、水中での動きや作業方法に大きな影響を与え、これはマグネットホイールの選択に間接的に関連しています。
正浮力(ポジティブボイアンシー): ロボットが水中で自然に浮くことを意味します。
- 利点: 電源や吸着力を失った場合、ロボットは自動的に水面に浮上するため、回収が容易になり、紛失のリスクが軽減されます。
- 適用シナリオ: 水中構造物に長期的または強力に吸着する必要がないロボット、または作業後に迅速な浮上が必要な場合に適しています。
- マグネットホイールへの影響: 正浮力のロボットが水中構造物の底面や側壁で吸着作業を行う必要がある場合、マグネットホイールは浮力に対抗するために、より大きな上向きまたは横向きの吸着力を提供する必要があります。
負浮力(ネガティブボイアンシー): ロボットが水中で自然に沈むことを意味します。
- 利点: ロボットはより安定して目標深度まで降下でき、自重を利用して水中構造物の上面や側壁への吸着を補助できるため、マグネットホイールに必要な吸着力を減らすことができます。
- 適用シナリオ: 水中構造物での長期作業が必要なロボット、または深海環境での調査やメンテナンスに適しています。
- マグネットホイールへの影響: 負浮力はロボットが吸着面に「押し付けられる」のを助けます。マグネットホイールの主な役割は、移動のための横方向の摩擦と、傾斜時や反転時の十分な吸着力を提供することです。
中性浮力(ニュートラルボイアンシー): 理想的には、多くの水中ロボットは中性浮力になるように設計されており、水中で浮きも沈みもしません。これにより、ロボットが水中移動中に克服する必要がある浮力や重力が最小限に抑えられ、スラスターやマグネットホイールへの負担が軽減され、エネルギー効率と操縦性が向上します。
- 実現方法: 通常、ロボットのバラストと浮力材(浮力モジュールなど)を調整することで実現されます。
まとめ: 浮力設計は、ロボットのマグネットホイール吸着力の必要性に直接影響します。正浮力のロボットは浮力を克服するためにより多くの吸着力を必要としますが、負浮力のロボットは重力を利用して吸着を補助できます。

5. マグネットホイールの耐荷重能力:計算とマージン
マグネットホイールの耐荷重能力は、ロボットとそのミッション機器を支える能力を示す重要な指標です。
総負荷計算: マグネットホイールの総耐荷重能力は、以下の重量をカバーする必要があります:
- ロボット本体重量: これは基本的な重量です。
- 搭載機器およびツールの重量: センサー、カメラ、マニピュレーター、清掃ツールなどが含まれます。
- マグネットホイールの自重: 大径のマグネットホイールの場合、その自重は見過ごすべきではなく、総負荷に含める必要があります。

安全マージンの確保: 実際のアプリケーションでは、表面の凹凸、汚れ、水流の影響などの要因により、実際の吸着力が低下する可能性があります。したがって、マグネットホイールを選択する際には、その定格耐荷重能力は理論的に計算された総重量よりも大幅に大きくする必要があり、通常は20%〜50%、あるいはそれ以上の安全マージンが推奨されます。つまり、ロボットの重量が100kgの場合、120kg〜150kg、あるいはそれ以上の吸着力を持つマグネットホイールを選択する必要があるかもしれません。
6. 摩擦とモーター負荷:推進力の核心
マグネットホイールの摩擦は、ロボットの機動性に直接影響し、必要なモーター出力を決定します。
摩擦と吸着力: 摩擦力(F摩擦)は、マグネットホイールの吸着力(F吸着)と接触面間の摩擦係数(μ)に関連しています:F摩擦 = μ × F吸着。特に傾斜面や垂直面において、安定した水中移動を確保するために十分な摩擦を提供するには、より高い摩擦係数と十分に大きな吸着力が必要です。
モーター出力: ロボットの総重量(すべての負荷を含む)が大きい場合、または大きな水流抵抗や生物付着を克服する必要がある場合、ロボットが効率的に移動するには、より強力な駆動モーターが必要になります。モーター出力が不足すると、移動が遅くなったり、登坂が困難になったり、移動できなくなったりする可能性があります。
エネルギー効率と熱管理: 高出力モーターはエネルギー消費量が大きいことを意味し、それに応じたバッテリーパックが必要です。また、過熱が性能や寿命に影響を与えるのを防ぐために、水中でのモーターの放熱についても考慮する必要があります。

その他の考慮すべき要素
上記の核心的な要素に加えて、水中ロボット用マグネットホイールを選択する際には、以下の点も考慮する価値があります:
- サイズと重量: マグネットホイールのサイズと重量は、ロボットの全体的な設計、操縦性、および展開と回収の容易さに影響します。吸着要件を満たしつつ、コンパクトで軽量な設計を優先すべきです。
- メンテナンスと寿命: メンテナンスの容易さとマグネットホイールの予想寿命を考慮してください。一部の設計では、摩耗した部品の交換や定期的なメンテナンスが容易な場合があります。
- コスト: コストはどのプロジェクトにおいても避けられない要素です。すべての性能要件を満たす最も費用対効果の高いソリューションを選択してください。
- カスタマイズ性: 特定のサイズ、吸着力、または他の機能(センサーなど)の統合など、一部の特別なアプリケーションではカスタマイズされたマグネットホイールソリューションが必要になる場合があります。
- 水流の影響: 水中ロボットは、特に強い海流の中や水中構造物の近くで、水流の影響を受けることがよくあります。マグネットホイールの吸着力とロボット全体の流線型設計は、水流の推力に効果的に抵抗する方法を考慮する必要があります。
上記の要素を総合的に考慮することで、水中ロボットに最適で信頼性の高いマグネットホイールを選択でき、複雑な水中環境でのさまざまなタスクの効率的かつ安全な完了を保証できます。