
 English
English Deutsch
Deutsch Español
Español Français
Français 한국어
한국어 日本語
日本語
Подводные роботы (ТНПА или АНПА) играют все более важную роль в подводных операциях. Их способность эффективно и стабильно выполнять задачи во многом зависит от производительности их основных компонентов. Для подводных роботов, которым необходимо перемещаться по металлическим поверхностям, выбор магнитных колес имеет решающее значение. В этой статье рассматриваются ключевые факторы, которые следует учитывать при выборе магнитных колес для подводных роботов, что поможет вам принять обоснованное решение.
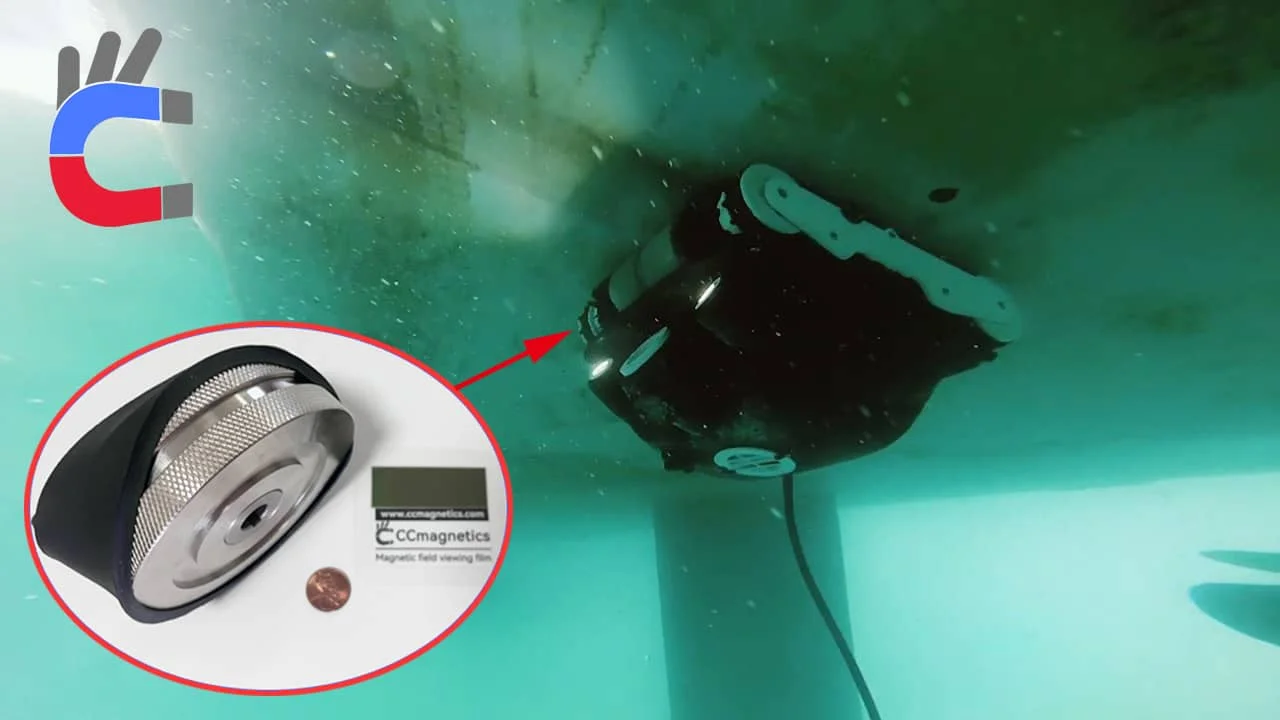
1. Гидроизоляция, коррозионная стойкость и герметизация: суровые условия подводной среды
Подводная среда сильно отличается от наземной: высокое давление и агрессивные среды (такие как соли и различные микроорганизмы в морской воде) предъявляют чрезвычайно высокие требования к гидроизоляции и коррозионной стойкости оборудования.
Полностью герметичная конструкция: Это самое основное и критическое требование для подводных магнитных колес. Магнитные материалы и механические компоненты внутри магнитного колеса должны быть полностью изолированы от воды, чтобы предотвратить проникновение, которое может привести к коррозии, коротким замыканиям или механическому отказу. Такие методы, как уплотнительные кольца, уплотнения из ферромагнитной жидкости или сварные уплотнения, обычно используются для достижения высококачественной гидроизоляции.
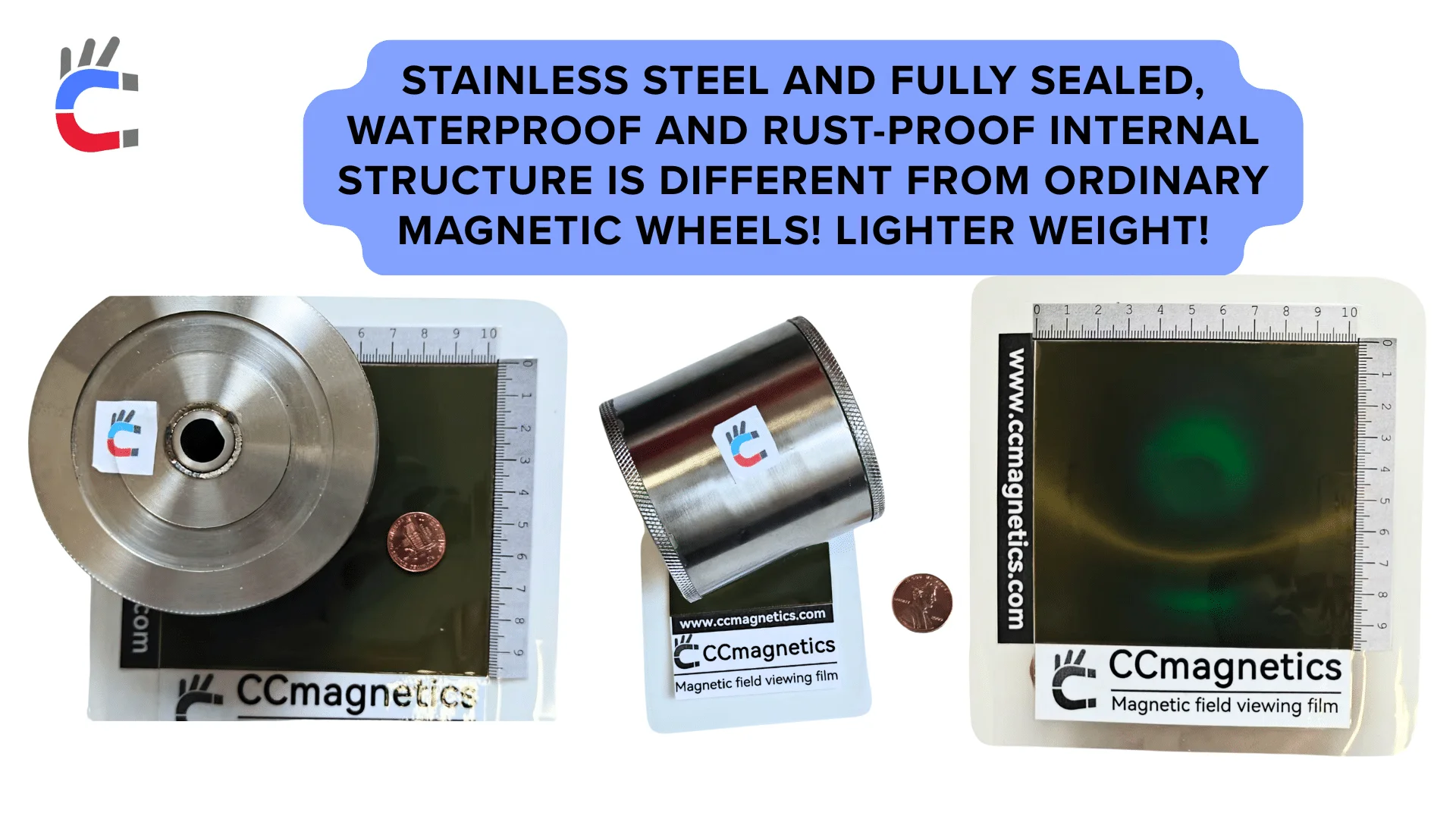
Выбор материала: Внешний корпус и внутренние компоненты магнитного колеса должны быть изготовлены из коррозионно-стойких материалов, таких как нержавеющая сталь (особенно морская нержавеющая сталь 316L), титановый сплав или инженерные пластики. Что касается самих магнитов, то, хотя постоянные магниты (например, неодим-железо-бор) обеспечивают сильную магнитную силу, они очень восприимчивы к окислению во влажной среде. Поэтому необходима специальная антикоррозионная обработка, такая как капсулирование эпоксидной смолой, гальваническое покрытие никель-медь-никель (Ni-Cu-Ni) или полимерные покрытия.
Магнитная сила и проникновение: Подводная среда по своей сути не влияет на проникновение магнитной силы. Сила магнитного притяжения зависит от характеристик магнита и конструкции магнитной цепи. Однако подводным магнитным колесам может потребоваться справляться с поверхностями корпуса, покрытыми биообрастанием (например, ракушками, водорослями) или покрытиями. Эти среды увеличивают расстояние между магнитным полем и металлической поверхностью, тем самым ослабляя эффективное сцепление. Поэтому для преодоления этих зазоров необходимы магнитные колеса с достаточно сильной магнитной силой.

Магнитная передача
2. Защитные резиновые рукава: предотвращение царапин на корпусе
Устанавливать ли резиновый рукав, зависит от сценария применения и требований к поверхности проверяемого объекта.
Защита краски корпуса: Для роботов, которым необходимо прикрепляться к поверхности корпуса, труб или другим покрытым поверхностям для осмотра или очистки, добавление износостойких резиновых рукавов имеет решающее значение. Резиновые рукава могут эффективно увеличить трение и предотвратить прямой контакт магнитных колес с поверхностью корпуса и появление царапин, особенно для дорогостоящих или легко повреждаемых покрытий.
Увеличение трения: Резиновые рукава также значительно увеличивают коэффициент трения между магнитным колесом и контактной поверхностью, улучшая сцепление робота со скользкими или загрязненными поверхностями, тем самым повышая стабильность подвижности и способность к подъему.
Материал и долговечность: Материал резинового рукава должен обладать хорошей износостойкостью, коррозионной стойкостью, устойчивостью к ультрафиолетовому излучению и антивозрастными свойствами, чтобы выдерживать длительное использование в подводной среде.

3. Дополнительные эксплуатационные возможности и соображения по нагрузке: водяные пистолеты высокого давления и шлифовальные инструменты
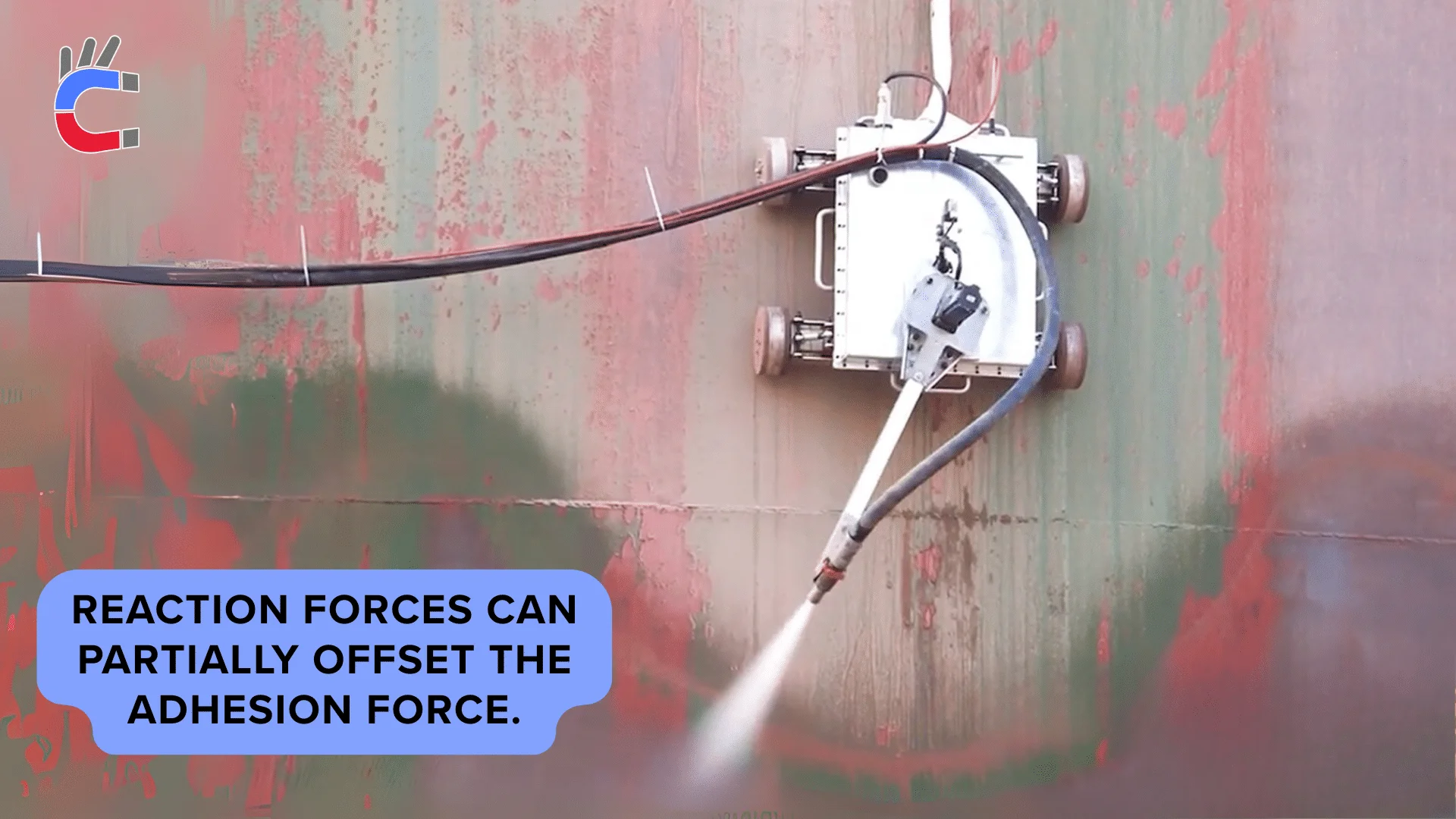
Подводным роботам часто необходимо переносить различные рабочие инструменты, и вес этих инструментов, а также силы реакции, возникающие во время работы, напрямую влияют на выбор магнитных колес.
Увеличенная нагрузка: Переноска такого оборудования, как водяные пистолеты высокого давления, шлифовальные инструменты, щетки или массивы датчиков, значительно увеличивает общий вес робота. Грузоподъемность магнитного колеса должна выдерживать вес тела робота, вес всех переносимых инструментов и дополнительную тягу или тяговое усилие, возникающие во время работы инструмента.
Рабочие силы реакции: Особенно при использовании водяных пистолетов высокого давления или шлифовальных инструментов возникают сильные силы реакции, которые пытаются оттолкнуть или оттянуть робота от прикрепленной поверхности. Сила сцепления магнитного колеса должна быть намного больше этих сил реакции, чтобы робот оставался стабильно прикрепленным к поверхности и выполнял свою задачу.
Потребление энергии и срок службы батареи: Дополнительные операции не только увеличивают вес, но и, как правило, означают более высокое потребление энергии. Это влияет на выносливость батареи робота и должно быть сбалансировано при проектировании системы.
4. Конструкция плавучести: положительная или отрицательная плавучесть?
Характеристики плавучести робота существенно влияют на его подводное движение и методы работы, которые косвенно связаны с выбором магнитных колес.
Положительная плавучесть: Означает, что робот будет естественно плавать в воде.
- Преимущества: Если питание или сцепление потеряно, робот автоматически всплывает на поверхность, что облегчает восстановление и снижает риск потери.
- Сценарии применения: Подходит для роботов, которым не требуется длительное или сильное сцепление с подводными конструкциями, или когда требуется быстрое всплытие после операций.
- Влияние на магнитные колеса: Если роботу с положительной плавучестью необходимо выполнять операции сцепления на дне или боковых стенах подводной конструкции, магнитные колеса должны будут обеспечивать большее сцепление вверх или вбок, чтобы противодействовать плавучести.
Отрицательная плавучесть: Означает, что робот будет естественно тонуть в воде.
- Преимущества: Робот может более стабильно опускаться на заданную глубину и полагаться на собственный вес, чтобы помочь сцеплению с верхней частью или боковыми стенами подводных конструкций, уменьшая силу сцепления, требуемую от магнитных колес.
- Сценарии применения: Подходит для роботов, которым требуется длительная работа на подводных конструкциях, или для обследования и технического обслуживания в глубоководных условиях.
- Влияние на магнитные колеса: Отрицательная плавучесть помогает роботу «прижиматься» к прикрепленной поверхности. Основная роль магнитных колес заключается в обеспечении бокового трения для движения и достаточного сцепления при наклоне или перевороте.
Нейтральная плавучесть: В идеале многие подводные роботы рассчитаны на нейтральную плавучесть, что означает, что они не плавают и не тонут в воде. Это минимизирует плавучесть или гравитацию, которые робот должен преодолевать во время подводного движения, тем самым снижая нагрузку на движители или магнитные колеса и повышая энергоэффективность и маневренность.
- Достижение: Обычно достигается путем регулировки балласта робота и плавучих материалов (например, модулей плавучести).
Резюме: Конструкция плавучести напрямую влияет на потребность робота в сцеплении магнитного колеса. Роботам с положительной плавучестью требуется больше сцепления от магнитных колес для преодоления плавучести, в то время как роботы с отрицательной плавучестью могут использовать гравитацию для помощи в сцеплении.

5. Грузоподъемность магнитного колеса: расчет и запас
Грузоподъемность магнитных колес является критическим показателем их способности нести робота и его оборудование для выполнения миссии.
Расчет общей нагрузки: Общая грузоподъемность магнитных колес должна покрывать следующие веса:
- Вес тела робота: Это базовый вес.
- Вес переносимого оборудования и инструментов: Включает датчики, камеры, манипуляторы, чистящие инструменты и т. д.
- Собственный вес магнитного колеса: Для магнитных колес большего диаметра их собственный вес не следует упускать из виду и следует включать в общую нагрузку.

Без рубрики
Оставьте запас прочности: В практических приложениях из-за таких факторов, как неровные поверхности, обрастание и воздействие течения воды, фактическая сила сцепления может уменьшиться. Поэтому при выборе магнитных колес их номинальная грузоподъемность должна быть значительно больше теоретически рассчитанного общего веса, обычно рекомендуется запас прочности от 20% до 50% или даже выше. Это означает, что если ваш робот весит 100 кг, вам может потребоваться выбрать магнитные колеса с силой сцепления 120-150 кг или даже выше.
6. Трение и нагрузка на двигатель: ядро движущей силы
Трение магнитных колес напрямую влияет на подвижность робота и определяет требуемую мощность двигателя.
Трение и сцепление: Сила трения (Fтрения) связана с силой сцепления магнитного колеса (Fсцепления) и коэффициентом трения (μ) между контактными поверхностями: Fтрения=μ×Fсцепления. Более высокий коэффициент трения и достаточно большая сила сцепления необходимы для обеспечения достаточного трения для обеспечения стабильного подводного движения, особенно на наклонных или вертикальных поверхностях.
Мощность двигателя: Если общий вес робота (включая все нагрузки) значителен, или если ему необходимо преодолевать большое сопротивление течению воды или биообрастание, то для эффективного движения робота потребуется более мощный приводной двигатель. Недостаточная мощность двигателя может привести к медленному движению, трудностям при подъеме или даже невозможности движения.
Энергоэффективность и терморегулирование: Двигатели высокой мощности означают большее потребление энергии, требующее соответствующих аккумуляторных батарей. Также необходимо учитывать рассеивание тепла двигателя под водой, чтобы предотвратить перегрев, влияющий на производительность и срок службы.

Другие факторы, которые следует учитывать
В дополнение к основным факторам, упомянутым выше, при выборе магнитных колес для подводных роботов также стоит учитывать следующие моменты:
- Размер и вес: Размер и вес магнитных колес повлияют на общую конструкцию робота, маневренность и простоту развертывания и восстановления. При соблюдении требований к сцеплению приоритет следует отдавать компактной и легкой конструкции.
- Техническое обслуживание и срок службы: Учитывайте простоту технического обслуживания и ожидаемый срок службы магнитных колес. Некоторые конструкции могут быть проще для замены изношенных деталей или выполнения регулярного технического обслуживания.
- Стоимость: Стоимость является неизбежным фактором в любом проекте. Выберите наиболее экономически эффективное решение, отвечающее всем требованиям производительности.
- Возможность настройки: Некоторые специальные приложения могут потребовать индивидуальных решений для магнитных колес, таких как определенные размеры, силы сцепления или интеграция других функций (например, датчиков).
- Воздействие течения воды: Подводные роботы часто подвергаются воздействию течений воды, особенно в сильных океанских течениях или вблизи подводных сооружений. Сила сцепления магнитного колеса и общая обтекаемая конструкция робота должны учитывать, как эффективно противостоять напору водных течений.
Всесторонне учитывая вышеуказанные факторы, вы сможете выбрать наиболее подходящие и надежные магнитные колеса для вашего подводного робота, тем самым обеспечив его эффективное и безопасное выполнение различных задач в сложных подводных условиях.