
 English
English Deutsch
Deutsch Русский
Русский Français
Français 한국어
한국어 日本語
日本語
Un encóder magnético es un sensor indispensable en los sistemas de control de movimiento, utilizado para medir el desplazamiento angular, el desplazamiento lineal, la velocidad y la aceleración del movimiento mecánico. Entre ellos, los codificadores magnéticos se utilizan ampliamente en el campo industrial debido a su excelente resistencia a la contaminación y durabilidad. En función de sus diferentes señales de salida, los encóderes magnéticos se dividen principalmente en dos categorías principales: Codificadores incrementales y codificadores absolutos.
1. Codificador incremental
Un codificador incremental es un dispositivo que utiliza los cambios del campo magnético de un anillo magnético (o escala magnética) para generar señales eléctricas periódicas, midiendo así el desplazamiento relativo.
1.1 Principio básico de funcionamiento
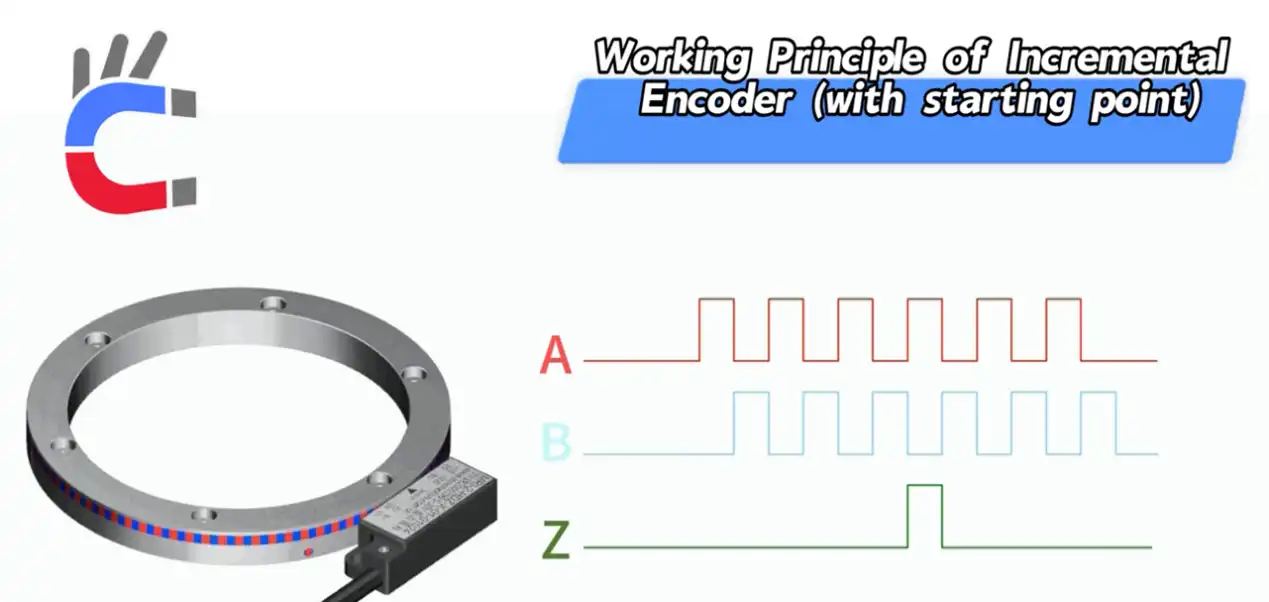
- Estructura del anillo magnético: El anillo magnético incremental tiene pares de polos magnéticos N y S de igual anchura dispuestos alternativamente a lo largo de su circunferencia.
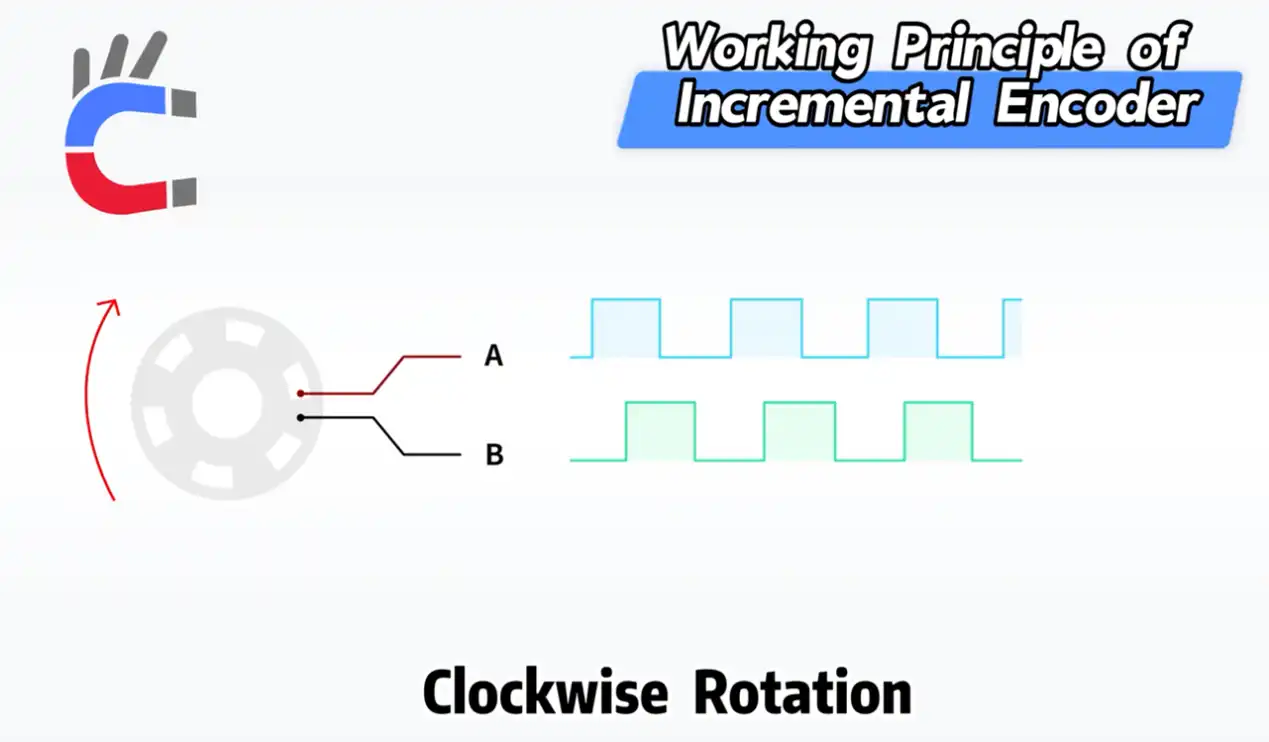
- Generación de señales: Los sensores (como los sensores magnetorresistivos o los sensores Hall) leen los cambios del campo magnético en el anillo magnético giratorio y generan dos señales de onda cuadrada con una diferencia de fase de 90°, típicamente denominadas Fase A y Fase B (o señales seno/coseno).
- El número de pares de polos magnéticos determina la resolución del codificador (un par de polos magnéticos corresponde a un periodo de señal).
- Medición del desplazamiento: Durante cada rotación, las fases A y B emiten una serie de impulsos. El sistema calcula la cantidad de desplazamiento contando el número de estos impulsos.
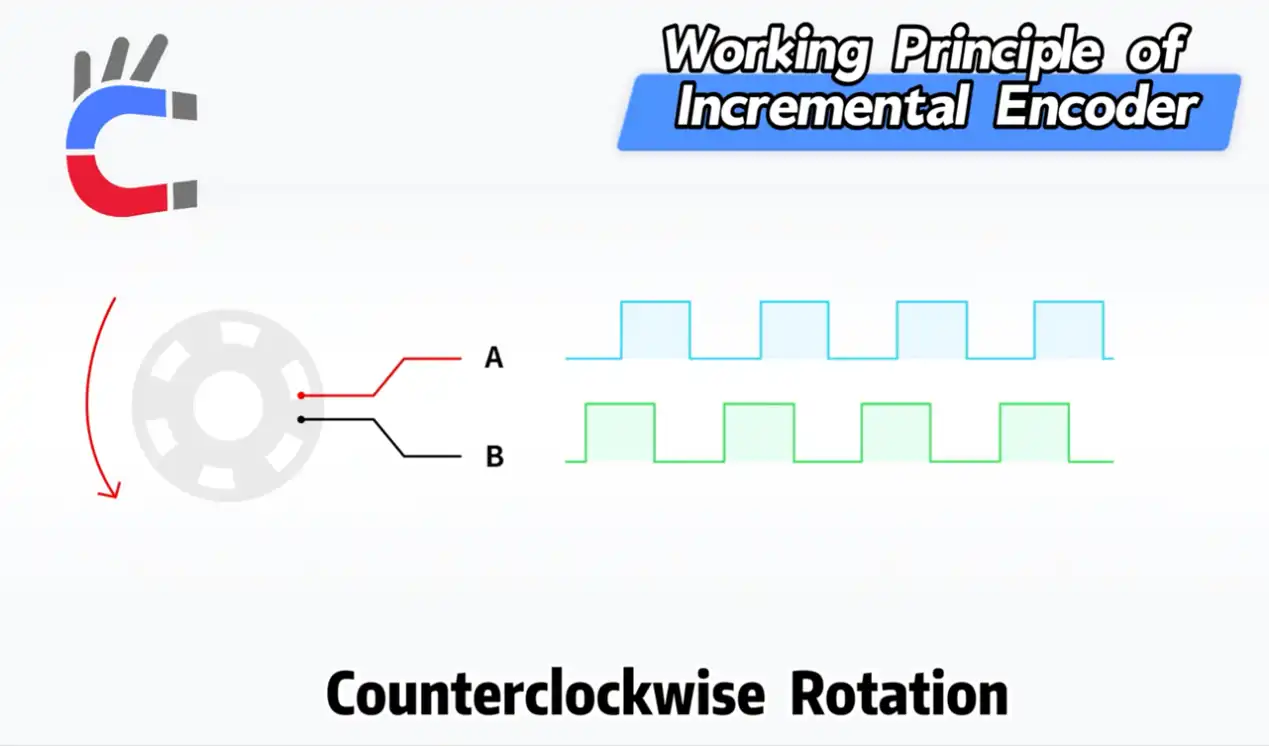
- Determinación de la dirección (decodificación en cuadratura): La diferencia de fase de 90° entre la Fase A y la Fase B se utiliza para determinar la dirección de rotación.
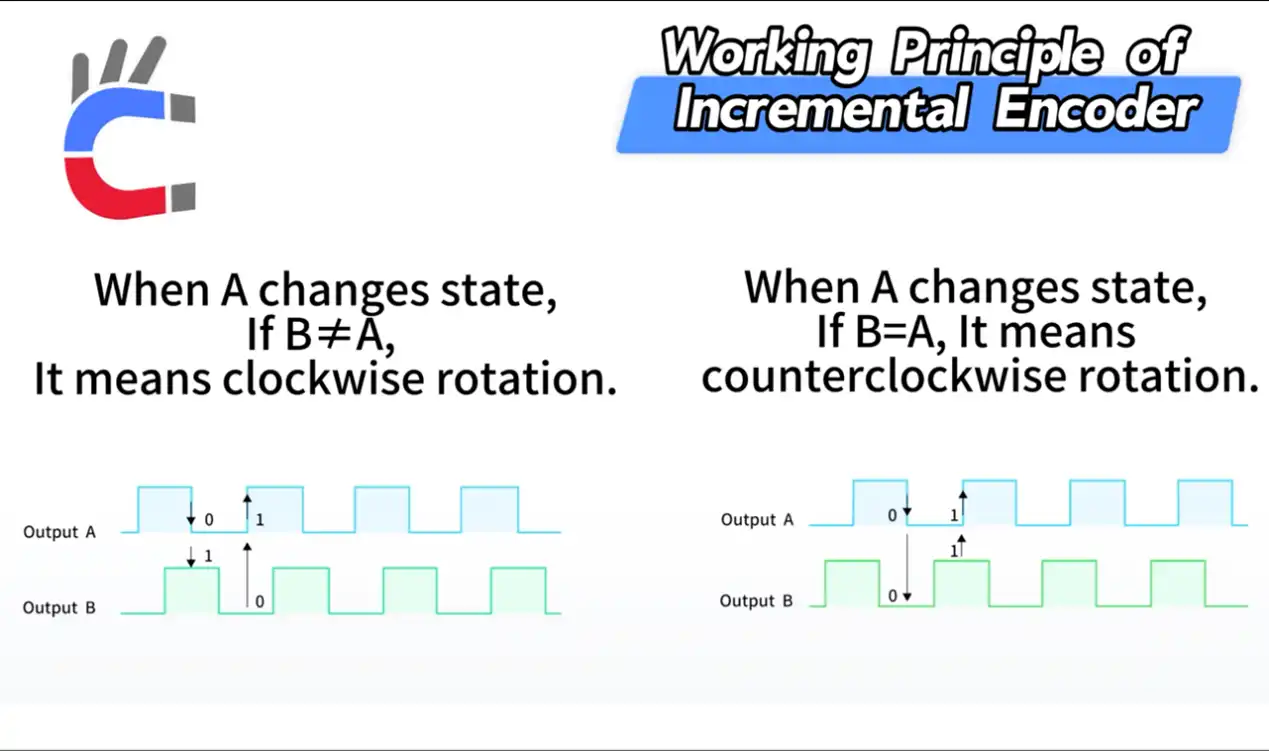
- Rotación en el sentido de las agujas del reloj: Cuando la Fase A cambia de estado, si B ≠ A (es decir, la Fase B va por detrás de la Fase A), indica rotación en el sentido de las agujas del reloj.
- Rotación antihoraria: Cuando la Fase A cambia de estado, si B = A (es decir, la Fase A va por detrás de la Fase B, o la Fase B va por delante de la Fase A), indica rotación en sentido antihorario.
- Rotación en el sentido de las agujas del reloj: Cuando la Fase A cambia de estado, si B ≠ A (es decir, la Fase B va por detrás de la Fase A), indica rotación en el sentido de las agujas del reloj.
1.2 Características de los encóderes incrementales
- Posición relativa: Los codificadores incrementales sólo proporcionan información de desplazamiento relativo, es decir, la cantidad de cambio de desplazamiento a partir del último punto de medición.
- Memoria de desconexión: No poseen una función de memoria de apagado. Cuando el sistema se queda sin alimentación, el contador de impulsos se pone a cero y el encóder no puede conocer la posición actual. Después de volver a encenderlo, debe encontrar un punto de referencia (operación homing) para determinar la posición absoluta.
- Aplicaciones industriales: Adecuado para situaciones como el control de velocidad y el corte de longitud fija, en las que no es necesario conocer la posición exacta en el momento de la puesta en marcha, pero sí se requiere una medición precisa de la velocidad de movimiento y la distancia relativa.
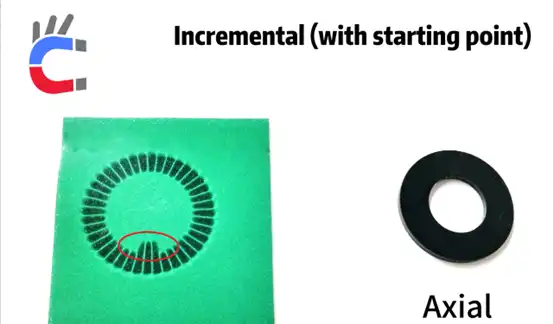
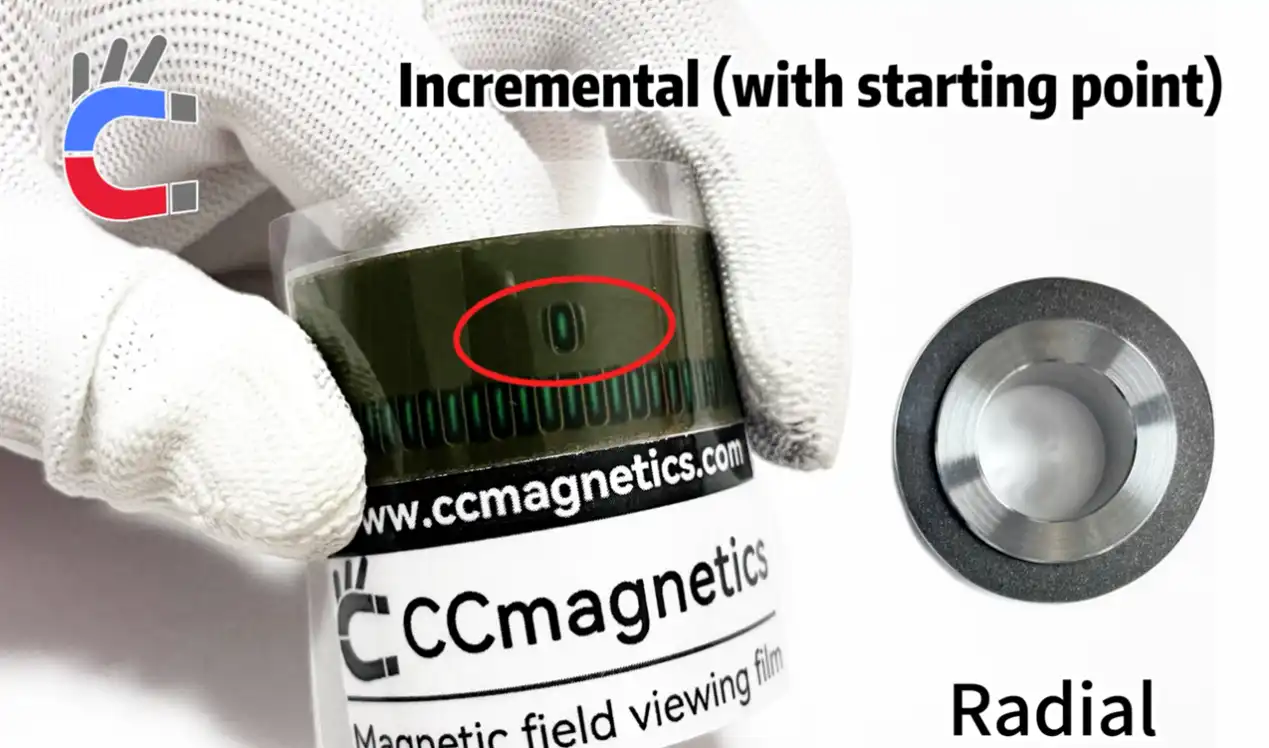
2. Codificador incremental con índice/marca de referencia
Para resolver el problema de los encóderes incrementales que necesitan volver a cero tras un corte de corriente, se introdujo una señal de "origen" o "posición cero", también conocida como fase Z o marca de referencia.
2.1 Principio de funcionamiento
- Señal de Fase Z: Además de la Fase A y la Fase B, se añade al anillo magnético una marca de referencia única (normalmente un polo o hueco magnético especial). Genera una sola señal de impulso por rotación completa, que es la señal de Fase Z.
- Determinación de la posición absoluta:
- El encóder comienza a girar tras encenderse.
- Cuando aparece el pulso de fase Z, el sistema borra el recuento de pulsos actual a cero o lo ajusta a una posición absoluta inicial conocida. Este punto de pulso Z sirve como "origen".
- A partir de entonces, contando los pulsos A/B, se puede conocer la posición absoluta relativa al origen.
- Aplicación práctica Lógica: El sonido "chirriante" que se menciona en el vídeo cuando arranca una impresora es el proceso de búsqueda del origen de la Fase Z por parte del encoder incremental. En control industrial, este proceso se denomina Homing, y es un paso crucial que debe completarse antes del arranque.
2.2 Aplicaciones industriales
Comúnmente utilizado en equipos que requieren una operación de homing para establecer un sistema de coordenadas, como máquinas herramienta, robots e impresoras. Su ventaja radica en tener un coste inferior al de los encóderes absolutos, al tiempo que permite obtener la posición absoluta mediante la operación de homing.
2.3 Procesamiento de señales de encóderes incrementales: Decodificación en cuadratura y multiplicación
Los encóderes incrementales emiten señales de Fase A, Fase B y Fase Z. Suelen ser señales diferenciales (como RS-422) para mejorar la capacidad antiinterferencia.
- Núcleo del procesamiento de señales: Decodificación en cuadratura
El controlador (como un PLC o una tarjeta de control de movimiento) necesita procesar las señales A/B para obtener información de posición y dirección:
- Determinación de la dirección: Basándose en la diferencia de fase (90°) entre la Fase A y la Fase B, determina la dirección de rotación (sentido horario/antihorario).
- Recuento de impulsos: Acumula o decrementa los pulsos basándose en la dirección para obtener la cantidad total de desplazamiento.
- Mejora de la precisión: Tecnología de Multiplicación
Para mejorar la resolución de posición, los impulsos originales no suelen contarse directamente, sino que se emplea la tecnología de multiplicación:
- Multiplicación 1X: El recuento se produce sólo en el flanco ascendente de la fase A.
- Multiplicación 2X: El recuento se produce tanto en el flanco ascendente como en el descendente de la fase A.
- Multiplicación 4X: El recuento se produce en todos los flancos (ascendente y descendente) tanto de la fase A como de la fase B. Este es el método más utilizado, ya que cuadruplica la resolución nominal del encóder.
Suponiendo que un encóder tenga N impulsos por revolución (PPR), tras aplicar la multiplicación 4X, la resolución real recibida por el controlador pasa a ser de 4N recuentos por revolución (CPR).
- Cálculo de la velocidad
El cálculo de la velocidad se consigue tomando el número total de pulsos recibidos en una unidad de tiempo.
$$Velocidad de Rotación (RPM) = \frac{Conteo de Pulsos \times 60}{Intervalo de Tiempo (s) \times CPR}$$
Velocidad de rotación (RPM)
- Nombre completo: Revoluciones Por Minuto.
- Significado: Es el resultado final calculado, que representa el número de revoluciones completas que hace un dispositivo (por ejemplo, el eje de un motor, una rueda) por minuto. Es la unidad de velocidad de rotación más utilizada en ingeniería y mecánica.
Recuento de impulsos
- Significado: El número total de pulsos detectados por el encoder o sensor dentro de su intervalo de tiempo establecido.
- Significado físico: Durante la rotación del codificador, éste emite un pulso eléctrico cada vez que gira más allá de un ángulo específico. Cuantos más impulsos haya, mayor será el ángulo o el número de revoluciones giradas dentro del mismo período de tiempo.
Intervalo de tiempo (s)
- Unidad: Segundos (s).
- Significado: Este es el período de tiempo que utiliza para medir el recuento de pulsos. Por ejemplo, si ha contado 50 pulsos en 0,1 segundos, entonces el "intervalo de tiempo" aquí es 0,1 segundos.
RCP
- Nombre completo: Conteos por Revolución.
- Significado: Este es un parámetro inherente al encoder o sensor que está utilizando. Indica cuántas cuentas produce el dispositivo por cada rotación completa (360 grados).
- Criticidad: Este es un valor fijo, que debe determinar basándose en el manual de especificaciones del dispositivo que está utilizando.
- Posición cero / Procesamiento del origen (Fase Z)
La señal de Fase Z se utiliza para calibrar la posición absoluta. Durante el arranque del sistema o la búsqueda de origen:
- El sistema se mueve a alta velocidad para buscar el pulso de Fase Z.
- Cuando aparece el pulso de Fase Z (normalmente con una anchura de 1 a 2 periodos de pulso A/B), el controlador pone inmediatamente el contador a cero o lo ajusta a una posición inicial absoluta preestablecida.
3. Codificador absoluto
Un encóder absoluto proporciona un código digital único para representar su posición absoluta a lo largo de todo el ciclo de rotación.

3.1 Definición y ventajas de la posición absoluta
- Posición absoluta: Cada medición emite directamente un código digital correspondiente al ángulo actual, y este código es único entre 0° y 360°. Para cualquier ángulo dado del eje (por ejemplo, 10,5°, 180°, 359,9°), el encóder emitirá un código digital único. Cada posición tiene su propio "número de identificación".
- Memoria de apagado: La mayor ventaja es que dispone de memoria de desconexión. Independientemente de cuándo se aplique la alimentación, puede emitir inmediatamente la posición actual sin necesidad de búsqueda de referencia.
3.2 Principio de funcionamiento de los codificadores absolutos
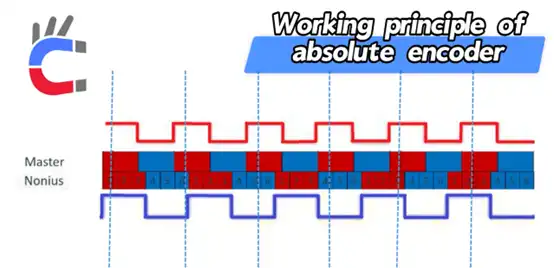
Los encóderes magnéticos absolutos suelen adoptar los principios multipista o Nonius para lograr el posicionamiento absoluto. El diagrama siguiente ilustra un encóder absoluto de una vuelta basado en el principio Nonius.
3.2.1 Principio Nonius
El núcleo del principio Nonius es el uso de dos pistas magnéticas (anillos magnéticos) con diferentes números de pares de polos magnéticos, determinando la posición absoluta a través de la diferencia en sus periodos de señal.
- Estructura del anillo magnético: Se emplean dos pistas magnéticas:
- Pista Maestra: Suponiendo que el número de pares de polos magnéticos es P (por ejemplo, 6 pares de polos como se muestra en el vídeo).
- Pista Nonius: El número de pares de polos magnéticos es P-1 (por ejemplo, 5 pares de polos como se muestra en el vídeo).
- Generación y cálculo de señales:
- Resolución fina: Las dos pistas generan dos conjuntos de señales seno/coseno respectivamente (por ejemplo, Seno(MT) y Seno(NT)), que se utilizan para calcular la posición fina dentro de un periodo del polo magnético. Esto se consigue mediante la técnica de interpolación de señales eléctricas.
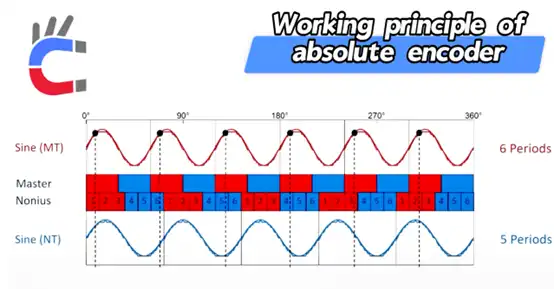
- Resolución gruesa: Debido a que las dos pistas tienen diferente número de polos magnéticos, la diferencia de fase entre ellas cambiará periódicamente a medida que giren.
- Dentro de un ciclo de rotación completo de 360°, la pista maestra y la pista Nonius generarán un desplazamiento de fase total (o diferencia de conteo) que cambia de 0° a 360°.
- Este desplazamiento de fase único puede servir como recuento del periodo del polo magnético maestro, utilizado para distinguir en qué periodo del polo magnético maestro se encuentra actualmente el encóder.
- Resolución fina: Las dos pistas generan dos conjuntos de señales seno/coseno respectivamente (por ejemplo, Seno(MT) y Seno(NT)), que se utilizan para calcular la posición fina dentro de un periodo del polo magnético. Esto se consigue mediante la técnica de interpolación de señales eléctricas.
- Fórmula de cálculo de la posición absoluta:
Posición Absoluta = Recuento de Períodos Maestro + Interpolación Maestro
3.3 Tipos de codificadores absolutos
- Absoluto de una vuelta: Mide el ángulo absoluto dentro del rango 0°-360°, pero no puede registrar el número de revoluciones.
- Absoluto multivuelta: Sobre la base del posicionamiento absoluto de una vuelta, se añade un engranaje u otro mecanismo de conteo para registrar el número de rotaciones, proporcionando así un mayor rango de posición absoluta.
3.4 Aplicaciones industriales
Los encóderes absolutos son la mejor elección para los servosistemas de alto rendimiento. Su característica de no requerir homing mejora enormemente la eficiencia y seguridad de los equipos:
- Robótica y automatización: Se utilizan para controlar con precisión la posición de las articulaciones y los brazos de los robots.
- Máquinas herramienta CNC: Retroalimentación de posición precisa para el husillo principal y los ejes de avance.
- Maquinaria pesada: Grúas, maquinaria portuaria, etc., garantizando la conservación de la información de posición actual en cualquier situación de fallo de alimentación.
- Conmutación del motor síncrono de imanes permanentes (PMSM): Tras el encendido del accionamiento, la conmutación electrónica puede realizarse directamente utilizando la información de posición absoluta, consiguiendo un arranque inmediato y suave del motor.
3.5 Procesamiento de señales de encóderes absolutos: Protocolos de comunicación serie
Los encóderes absolutos emiten directamente códigos de posición digitales; por lo tanto, el núcleo de su procesamiento de señales es el protocolo de comunicación, que garantiza la precisión y el rendimiento en tiempo real de la transmisión de datos.
- Protocolos típicos: BiSS-C y SSI
| Protocolo | SSI (Interfaz serie síncrona) | BiSS-C (serie bidireccional/síncrona) |
|---|---|---|
| Tipo | Comunicación serie síncrona unidireccional | Comunicación serie síncrona bidireccional (la más común) |
| Principio | El controlador envía una señal de Reloj, y el encoder transmite sincrónicamente los Datos de posición. | Incluye la función unidireccional de SSI, y añade un canal de retorno para leer y escribir los parámetros del codificador. |
| Características | Sencillo, estable, rendimiento moderado en tiempo real. | Alta velocidad, alto rendimiento en tiempo real (latencia de nanosegundos), utilizado para servosistemas de alto rendimiento. |
| Contenido de los datos | Principalmente datos de posición. | Datos de posición + suma de comprobación (CRC) + información de advertencia/diagnóstico. |
- Flujo de procesamiento de señales (tomando BiSS-C como ejemplo)
- Generación de reloj: El servoaccionamiento (controlador) genera una señal de reloj de alta velocidad (normalmente de unos pocos MHz a 10 MHz).
- Solicitud de datos: El controlador notifica al codificador que envíe datos a través de la señal de reloj.
- Transmisión de datos: El codificador transmite de forma sincrónica hasta varias docenas de bits de código de posición digital, suma de comprobación CRC y bits de estado de fallo al controlador.
- Verificación y análisis:
- Verificación CRC: El controlador realiza una verificación de redundancia cíclica de los datos recibidos. Si la verificación falla, los datos se consideran incorrectos, lo que normalmente activa una alarma o utiliza la posición del ciclo anterior.
- Análisis: Analiza el flujo de datos para extraer palabras de posición de alta precisión, como 24 ó 26 bits.
- Aplicación de encoders absolutos en servocontrol
La característica de los encóderes absolutos de no requerir una operación de búsqueda de referencia los convierte en la opción preferida para los servosistemas de alto rendimiento:
- Posicionamiento al encender: Tras el encendido del servoaccionamiento, el ángulo absoluto del motor puede obtenerse a través de una única comunicación, eliminando la necesidad de perder tiempo en la búsqueda de referencia.
- Conmutación electrónica: En el caso de los motores síncronos de imanes permanentes (PMSM), debe conocerse la posición inicial exacta del rotor para emitir correctamente el par de arranque. Los encóderes absolutos proporcionan esta información directamente, lo que permite al accionamiento realizar la conmutación electrónica directamente y arrancar el motor de forma suave e inmediata. Por el contrario, los encóderes incrementales requieren un proceso previo de "búsqueda del cero" o "identificación del ángulo inicial".
En resumen, el procesamiento de señales de los encóderes incrementales se centra en el recuento por hardware y la multiplicación por software, mientras que el procesamiento de señales de los encóderes absolutos se centra en la comunicación serie de alta velocidad y la verificación de datos.
4. Comparación resumida: Codificadores incrementales frente a absolutos
| Característica | Codificador incremental | Encóder incremental con índice/marca de referencia | Codificador absoluto |
|---|---|---|---|
| Salida de posición | Número de impulsos (posición relativa) | Número de impulsos (Posición relativa) | Código digital único (Posición absoluta) |
| Memoria de apagado | No | No | Sí |
| Operación de arranque | Debe volver a casa (búsqueda de la fase Z) | Debe volver a casa (búsqueda de fase Z) | No requiere búsqueda |
| Tipo de señal | Fases A/B (onda cuadrada / seno-coseno) | Fases A/B + Fase Z | Código multipista / Señal Nonius |
| Complejidad y coste | Baja | Media | Alta |
| Aplicaciones típicas | Control de velocidad, cintas transportadoras | Orientación de máquinas herramienta, impresoras | Articulaciones robóticas, posicionamiento de alta precisión |