
 English
English Deutsch
Deutsch Русский
Русский Español
Español Français
Français 한국어
한국어
磁気式エンコーダは、モーションコントロールシステムに欠かせないセンサであり、機械運動の角変位、直線変位、速度、加速度を計測するために使用される。その中でも磁気式エンコーダは、耐汚染性や耐久性に優れているため、産業分野で広く使用されています。磁気式エンコーダは、出力信号の違いにより、主に2つのカテゴリーに分けられます:インクリメンタルエンコーダと アブソリュートエンコーダです。
1.インクリメンタルエンコーダ
インクリメンタルエンコーダは、磁気リング(または磁気スケール)の磁界変化を利用して周期的な電気信号を生成し、相対変位を測定する装置です。
1.1 基本動作原理
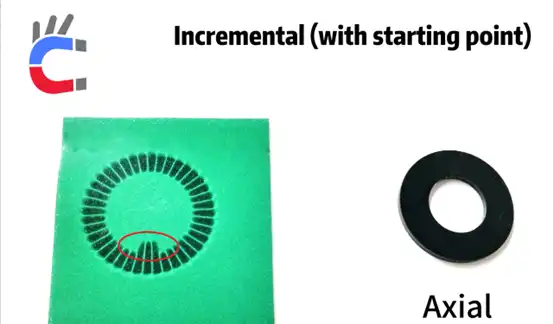
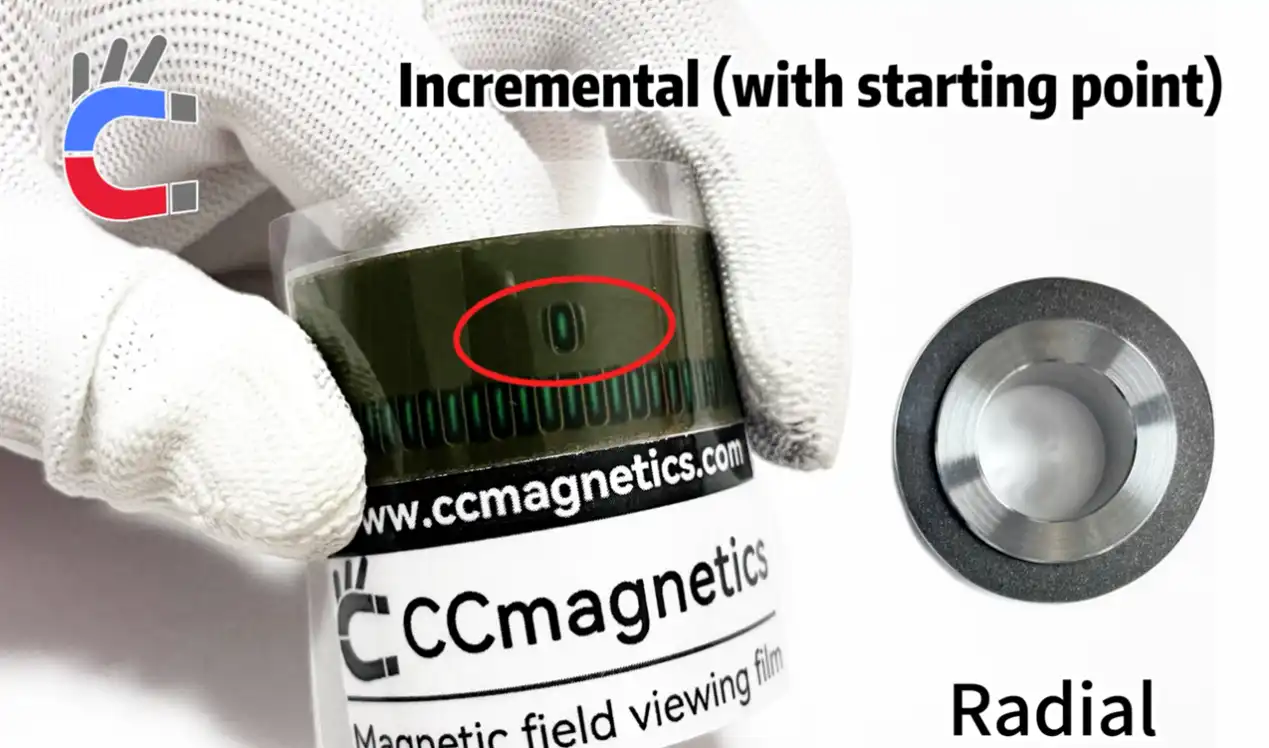
- 磁気リング構造:インクリメンタル磁気リングは、等しい幅のN極とS極の磁極対が円周に沿って交互に配置されています。
- 信号発生:センサ(磁気抵抗センサやホールセンサなど)は、回転する磁気リングの磁場変化を読み取り、位相差90°の2つの矩形波信号(一般にA相およびB相(またはサイン/コサイン信号)と呼ばれる)を生成します。
- 磁極対の数によってエンコーダの分解能が決まります(1磁極対は1信号周期に対応)。
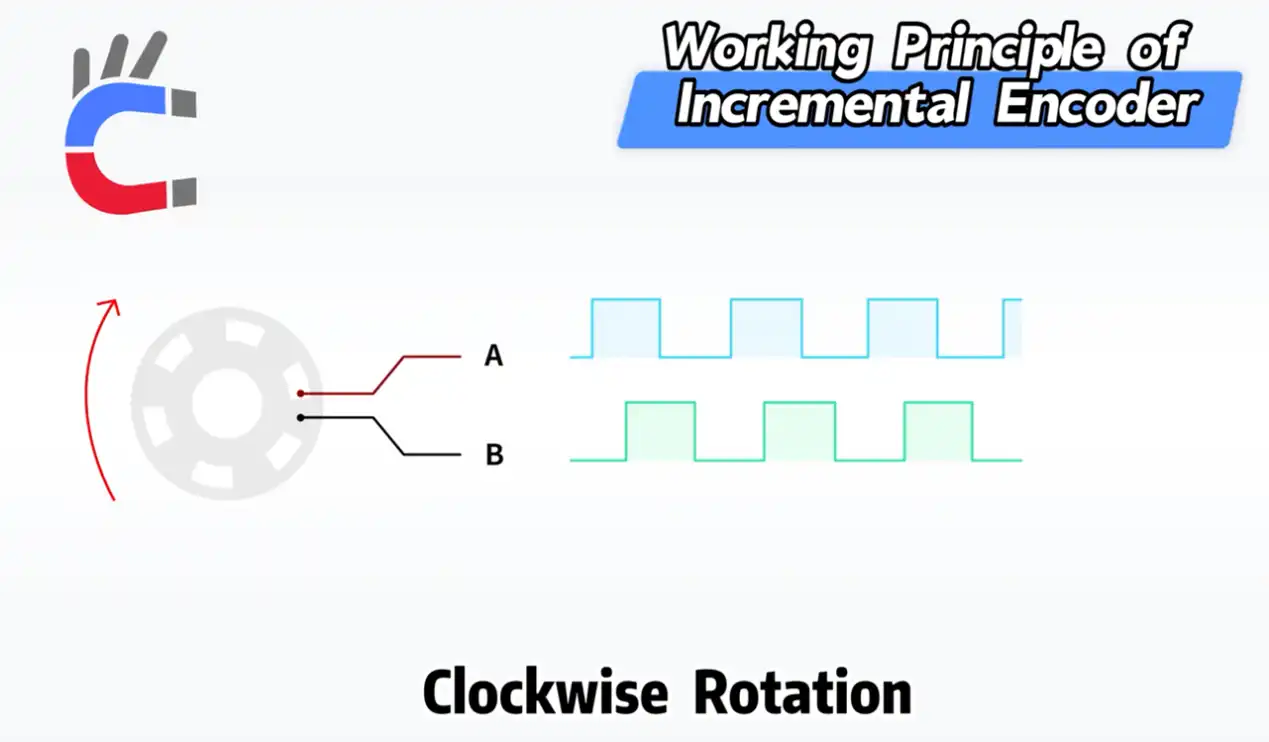
- 変位測定:各回転中、A相とB相は一連のパルスを出力します。このパルスの数をカウントすることで変位量を算出します。
- 方向決定(直交デコード):A相とB相の90°の位相差から回転方向を決定する。
- 時計回りの回転:A相の状態が変化したとき、B≠A(つまりB相がA相より遅れている)なら時計回り回転を示す。
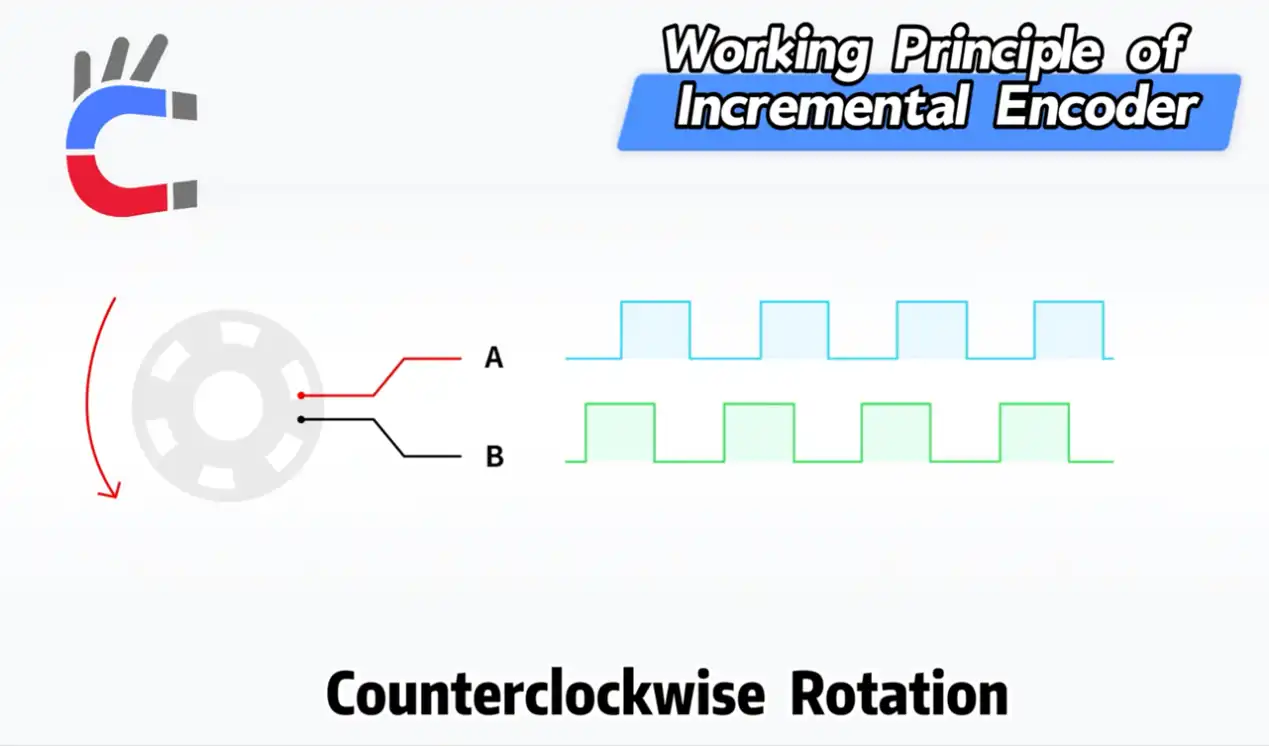
- 反時計回り回転:A 相の状態が変化するとき、B = A (つまり、A 相が B 相に遅れるか、B 相が A 相に先行する) 場合、反時計回り回転を示します。
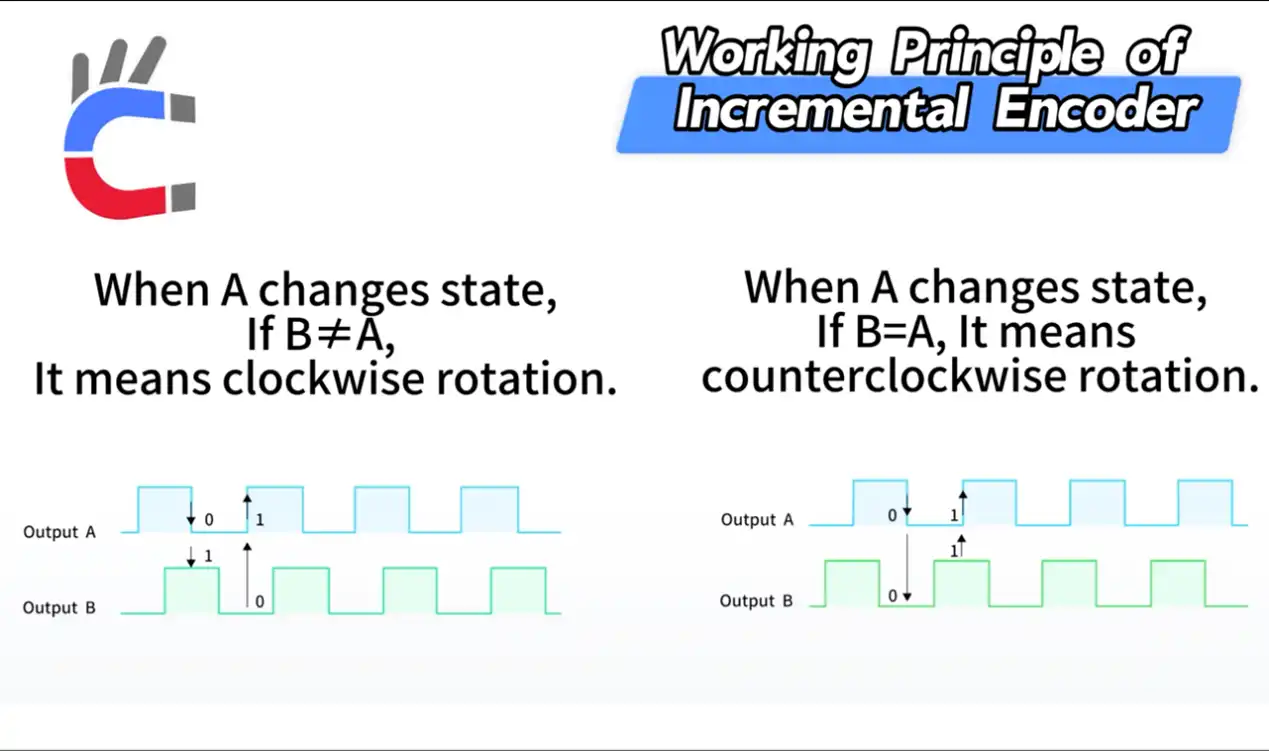
- 時計回りの回転:A相の状態が変化したとき、B≠A(つまりB相がA相より遅れている)なら時計回り回転を示す。
1.2 インクリメンタルエンコーダの特性
- 相対位置:インクリメンタルエンコーダは、相対的な変位情報のみを提供します。これは、最後の測定ポイントからの変位変化量を意味します。
- パワーオフメモリ:パワーオフメモリー機能はありません。システムの電源が切れると、パルスカウンタはゼロにリセットされ、エンコーダは現在位置を知ることができません。電源再投入後、絶対位置を決定するために基準点を見つける必要があります(原点復帰動作)。
- 産業用アプリケーション:速度制御や定寸切断など、起動時に正確な位置を知る必要はないが、動作速度と相対距離を正確に測定する必要がある場合に適しています。
2.インデックス/リファレンスマーク付きインクリメンタルエンコーダ
停電後にインクリメンタルエンコーダがゼロに戻る必要があるという問題を解決するために、「原点」または「ゼロ位置」信号が導入されました。
2.1 動作原理
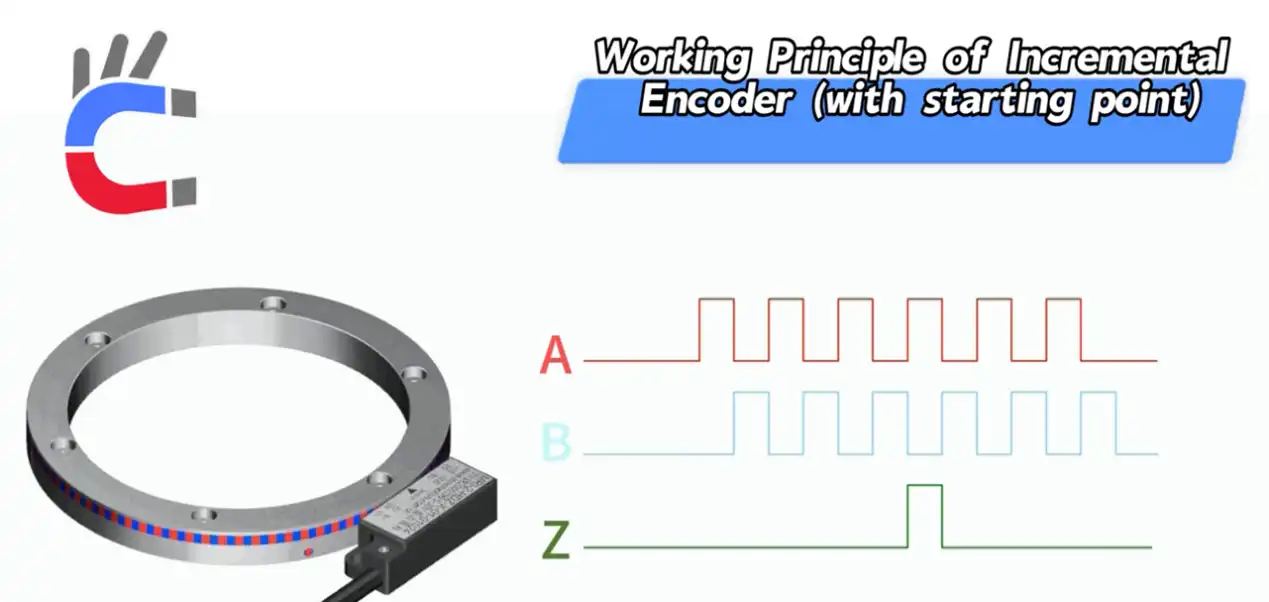
- Z相信号:A相とB相に加え、独自の基準マーク(通常は特殊な磁極またはギャップ)が磁気リングに追加されます。これは1回転につき1つのパルス信号のみを発生し、Z相信号となります。
- 絶対位置の決定:
- 電源投入後、エンコーダは回転を開始します。
- Z相パルスが現れると、システムは現在のパルスカウントをゼロにクリアするか、既知の初期絶対位置に設定します。このZパルスポイントが "原点 "となります。
- その後、A/Bパルスをカウントすることで、原点に対する絶対位置を知ることができます。
- 実用ロジック:ビデオにあるプリンター起動時の「キーキー」という音は、インクリメンタルエンコーダーがZ位相の原点を探すプロセスです。産業用制御では、このプロセスは原点復帰と呼ばれ、起動前に完了しなければならない重要なステップです。
2.2 産業用アプリケーション
工作機械、ロボット、プリンターなど、座標系を確立するために原点復帰が必要な装置でよく使用される。アブソリュートエンコーダよりも低コストでありながら、原点復帰動作によって絶対位置を取得できることが特長です。
2.3 インクリメンタルエンコーダの信号処理:直交復号と乗算
インクリメンタルエンコーダは、A相、B相、Z相信号を出力します。これらは通常、耐干渉性を高めるために差動信号(RS-422など)です。
- 信号処理の中核:直交デコーディング
コントローラ(PLCやモーション・コントロール・カードなど)は、位置と方向の情報を得るためにA/B信号を処理する必要があります:
- 方向決定:A相とB相の位相差(90°)に基づいて、回転方向(時計回り/反時計回り)を決定する。
- パルスカウント:方向に基づいてパルスを累積または減算し、総変位量を得る。
- 精度の向上:乗算技術
位置分解能を向上させるために、通常、元のパルスを直接カウントするのではなく、逓倍技術が採用される:
- 1倍逓倍:カウントはA相の立ち上がりエッジでのみ行われる。
- 2倍逓倍:A相の立ち上がりエッジと立ち下がりエッジの両方でカウントが行われる。
- 4倍逓倍:これは最も一般的に使用される方法で、エンコーダの公称分解能を4倍にします。
エンコーダのパルス数が1回転あたりN個(PPR)であるとすると、4倍逓倍を適用した後、コントローラが受け取る実際の分解能は1回転あたり4Nカウント(CPR)になります。
- 速度計算
速度計算は、単位時間内に受信したパルスの総数を取ることによって達成されます。
回転速度(RPM)={パルス数}{時間間隔(s)}{CPR回数}$$ で計算します。
回転速度(RPM)
- 正式名称:回転数/分。
- 意味:これは最終的な計算結果であり、装置(モーター・シャフト、車輪など)が1分間に行う全回転数を表す。工学や機械分野で最も一般的に使用される回転速度の単位である。
パルスカウント
- 意味:設定した時間間隔内にエンコーダまたはセンサによって検出されたパルスの総数。
- 物理的な意味:エンコーダの回転中、特定の角度を超えて回転するたびに1つの電気パルスを出力します。パルス数が多ければ多いほど、同じ時間内に回転した角度または回転数が大きくなる。
時間間隔 (s)
- 単位:秒(s)。
- 意味パルスカウントの測定に使用する時間です。例えば、0.1秒以内に50パルスをカウントした場合、ここでの「時間間隔」は0.1秒です。
心肺蘇生法
- 正式名称:カウント・パー・レボリューション(Counts Per Revolution)。
- 意味:使用するエンコーダまたはセンサ固有のパラメータです。デバイスが1回転(360度)するごとに出力するカウント数を示します。
- 重要度:これは固定値であり、使用するデバイスの仕様マニュアルに基づいて決定する必要があります。
- ゼロ位置・原点処理(Zフェーズ)
Z相信号は絶対位置の校正に使用します。システム起動時や原点復帰時に使用します:
- システムはZ相パルスを探すために高速で移動します。
- Z相パルス(通常は1~2A/Bパルス周期の幅)が表示されると、コントローラは直ちにカウンタをゼロにリセットするか、またはプリセットの絶対開始位置に設定します。
3.アブソリュートエンコーダ
アブソリュートエンコーダは、全回転サイクルを通じて絶対位置を表す一意のデジタルコードを提供します。

3.1 絶対位置の定義と利点
- 絶対位置:すべての測定は、現在の角度に対応するデジタルコードを直接出力し、このコードは 0°から 360°の間で一意です。シャフトの任意の角度(例えば、10.5°、180°、359.9°)に対して、エンコーダは唯一無二のデジタルコードを出力します。各ポジションにはそれぞれ "ID番号 "があります。
- パワーオフメモリ:最大の利点は、パワーオフメモリーを備えていることです。いつ電源が投入されても、原点復帰の必要がなく、すぐに現在位置を出力することができる。
3.2 アブソリュートエンコーダの動作原理
磁気式アブソリュートエンコーダは、一般的にマルチトラックまたはノニウスの原理を採用して絶対位置決めを行います。下図は、ノニウス原理に基づくシングルターンアブソリュートエンコーダを示しています。
3.2.1 ノニウスの原理
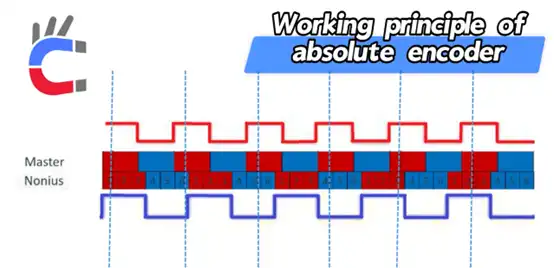
ノニウス原理の核心は、磁極対の数が異なる 2 つの磁気トラック(磁気リング)を使用し、その信号周期の差によって絶対位置を決定することです。
- 磁気リング構造:2つの磁気トラックを採用:
- マスタートラック:磁極対の数をPとする(例えば、ビデオのように6極対)。
- ノニウス・トラック:磁極対の数をP-1とする(例えば、ビデオのように5極対)。
- 信号の生成と計算:
- ファイン・レゾリューション:2つのトラックはそれぞれ2組のサイン/コサイン信号(例えばサイン(MT)とサイン(NT))を生成し、1磁極周期内の細かい位置を計算するために使用される。これは電気信号の補間技術によって実現されます。
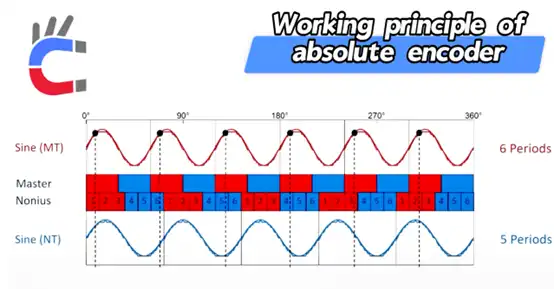
- 粗い分解能:2つのトラックは磁極の数が異なるため、両者の位相差は回転するにつれて周期的に変化する。
- 完全な360°回転サイクルの中で、マスタートラックとノニウストラックは、0°から360°まで変化する総位相シフト(またはカウント差)を生成します。
- このユニークな位相シフトはマスター磁極周期カウントとして機能し、エンコーダが現在どのマスター磁極周期にあるかを区別するために使用されます。
- ファイン・レゾリューション:2つのトラックはそれぞれ2組のサイン/コサイン信号(例えばサイン(MT)とサイン(NT))を生成し、1磁極周期内の細かい位置を計算するために使用される。これは電気信号の補間技術によって実現されます。
- 絶対位置の計算式
絶対位置 = マスター周期カウント + マスター補間
3.3 アブソリュート・エンコーダの種類
- シングルターン式アブソリュート:0°~360°の範囲で絶対角度を測定するが、回転数は記録できない。
- マルチターンアブソリュート:シングルターンアブソリュートをベースに、ギアセットなどのカウント機構を追加し、回転数を記録することで、絶対位置の範囲を大きくしたもの。
3.4 産業用途
アブソリュートエンコーダは、高性能サーボシステムの最有力候補です。原点復帰が不要という特性により、装置の効率と安全性が大幅に向上します:
- ロボット工学とオートメーション:ロボット工学と自動化:ロボットの関節やアームスパンの精密な位置制御に使用。
- CNC工作機械:主軸と送り軸の正確な位置フィードバック。
- 重機械:クレーン、港湾機械など、停電の状況下でも現在の位置情報を確実に保持します。
- 永久磁石同期モータ(PMSM)整流:ドライブに電源が投入された後、絶対位置情報を使用して電子整流を直接実行することができ、即座にスムーズなモータ起動を実現します。
3.5 アブソリュートエンコーダの信号処理シリアル通信プロトコル
アブソリュートエンコーダは、デジタル位置コードを直接出力するため、その信号処理の核となるのは通信プロトコルであり、データ伝送の精度とリアルタイム性を保証する。
- 代表的なプロトコルBiSS-C および SSI
| プロトコル | SSI (同期シリアルインターフェース) | BiSS-C(双方向/同期シリアル) |
|---|---|---|
| タイプ | 単方向同期シリアル通信 | 双方向同期シリアル通信(最も一般的なもの) |
| 原理 | コントローラがClock信号を送出し、エンコーダが同期して位置データを送出する。 | SSIの単方向機能を含み、エンコーダのパラメータを読み書きするためのリターンチャンネルを追加します。 |
| 特徴 | シンプル、安定、中程度のリアルタイム性能 | 高速、高リアルタイム性能(ナノ秒レベルのレイテンシ)、高性能サーボシステムに使用。 |
| データ内容 | 主に位置データ | 位置データ+チェックサム(CRC)+警告/診断情報。 |
- 信号処理の流れ(BiSS-Cを例とする)
- クロック生成:サーボドライブ(コントローラ)が高速クロック信号(通常数MHz~10MHz)を生成する。
- データ要求:クロック信号を介してエンコーダにデータ送信を通知する。
- データ送信:エンコーダは、最大数十ビットのデジタル位置コード、CRCチェックサム、フォルトステータスビットを同期してコントローラに送信します。
- 検証と解析
- CRC検証:コントローラは、受信データに対して巡回冗長検査を実行します。ベリファイに失敗した場合、データは不正確と見なされ、通常はアラームがトリガされるか、前のサイクルの位置が使用されます。
- 解析:データストリームを解析して、24ビットや26ビットなどの高精度位置ワードを抽出します。
- サーボ制御におけるアブソリュートエンコーダの応用
原点復帰動作を必要としないアブソリュートエンコーダの特性は、高性能サーボシステムに最適です:
- 電源投入時の位置決め電源投入時の位置決め:サーボドライブの電源投入後、1回の通信でモータの絶対角度を取得できるため、原点復帰に時間を費やす必要がありません。
- 電子整流:永久磁石同期モータ(PMSM)の場合、始動トルクを正しく出力するには、ロータの正確な初期位置を知る必要があります。アブソリュートエンコーダはこの情報を直接提供するため、ドライブは電子整流をすぐに実行でき、モータをスムーズかつ即座に始動できます。逆に、インクリメンタルエンコーダは、最初に「ゼロ検出」または「初期角度識別」プロセスを必要とします。
まとめると、インクリメンタルエンコーダの信号処理はハードウェアによるカウントとソフトウェアによる乗算に重点を置き、アブソリュートエンコーダの信号処理は高速シリアル通信とデータ検証に重点を置いている。
4.概要比較:インクリメンタルエンコーダとアブソリュートエンコーダの比較
| 特徴 | インクリメンタルエンコーダ | インデックス/リファレンスマーク付きインクリメンタルエンコーダ | アブソリュートエンコーダ |
|---|---|---|---|
| 位置出力 | パルス数(相対位置) | パルス数(相対位置) | 一意のデジタルコード(絶対位置) |
| パワーオフメモリ | なし | なし | あり |
| 起動操作 | マストホーム(Z相検索) | 原点復帰必須(Z相サーチ) | 原点復帰不要 |
| 信号タイプ | A/B相(方形波/正弦波) | A/B相+Z相 | マルチトラックコード / ノニウス信号 |
| 複雑さとコスト | 低 | 中 | 高 |
| 代表的なアプリケーション | 速度制御、コンベア | 工作機械の原点復帰、プリンター | ロボット関節、高精度位置決め |