
 English
English Deutsch
Deutsch Español
Español Français
Français 한국어
한국어 日本語
日本語
Магнитный энкодер - это незаменимый датчик в системах управления движением, используемый для измерения углового и линейного смещения, скорости и ускорения механических перемещений. Магнитные энкодеры широко используются в промышленности благодаря их отличной устойчивости к загрязнению и долговечности. На основании различных выходных сигналов магнитные энкодеры в основном делятся на две основные категории: Инкрементные энкодеры и Абсолютные энкодеры.
1. Инкрементный энкодер
Инкрементный энкодер - это устройство, которое использует изменения магнитного поля магнитного кольца (или магнитной шкалы) для генерации периодических электрических сигналов, измеряя таким образом относительное перемещение.
1.1 Основной принцип работы
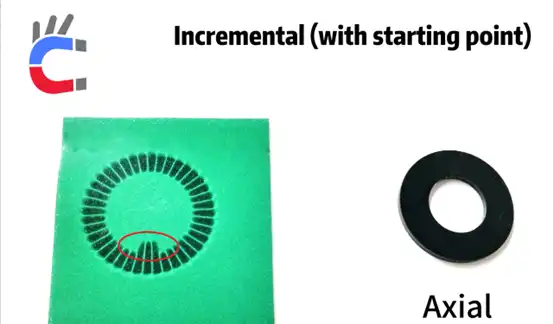
- Структура магнитного кольца: Инкрементальное магнитное кольцо имеет N- и S-полюсные пары магнитных полюсов одинаковой ширины, расположенные поочередно по его окружности.
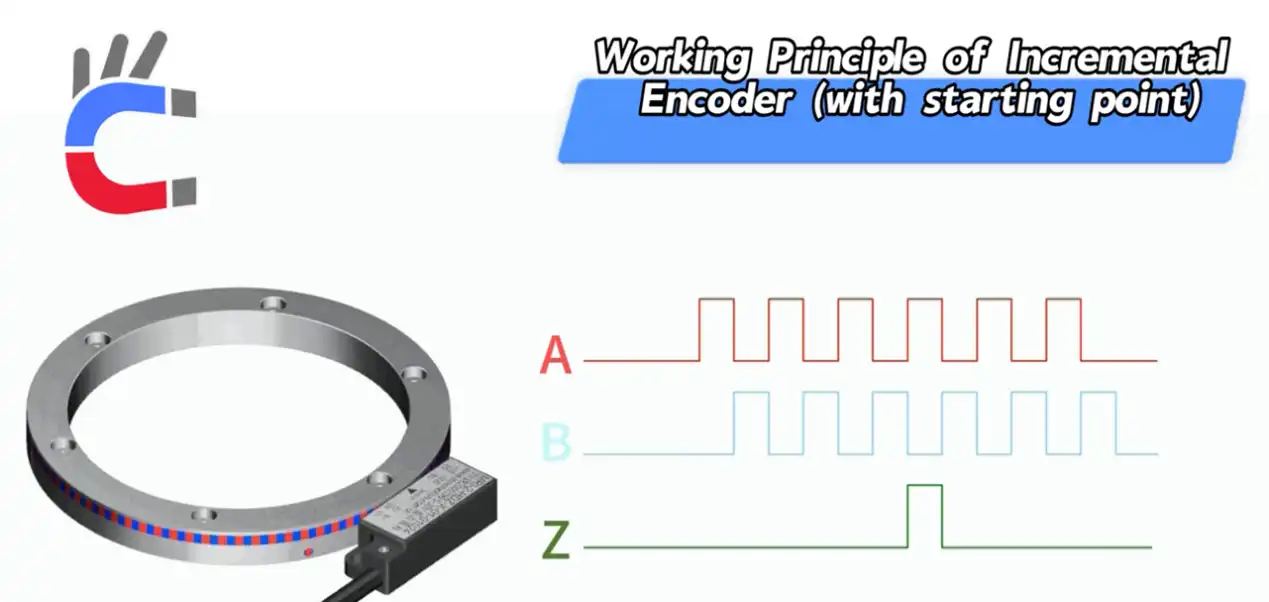
- Генерация сигнала: Датчики (например, магниторезистивные датчики или датчики Холла) считывают изменения магнитного поля на вращающемся магнитном кольце и генерируют два сигнала квадратной волны с разностью фаз 90°, обычно называемые фазой A и фазой B (или синусоидальными/косинусоидальными сигналами).
- Количество пар магнитных полюсов определяет разрешение энкодера (одна пара магнитных полюсов соответствует одному периоду сигнала).
- Измерение смещения: Во время каждого вращения фазы A и B выдают серию импульсов. Система рассчитывает величину смещения, подсчитывая количество этих импульсов.
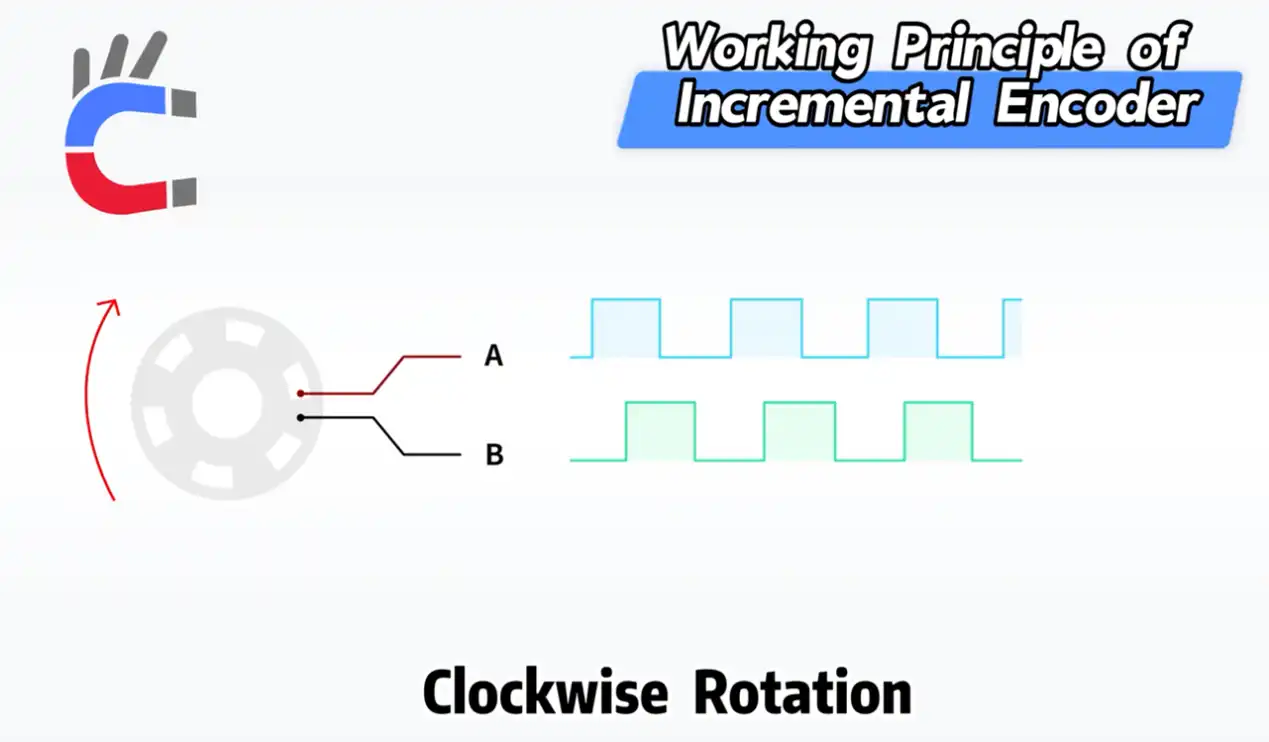
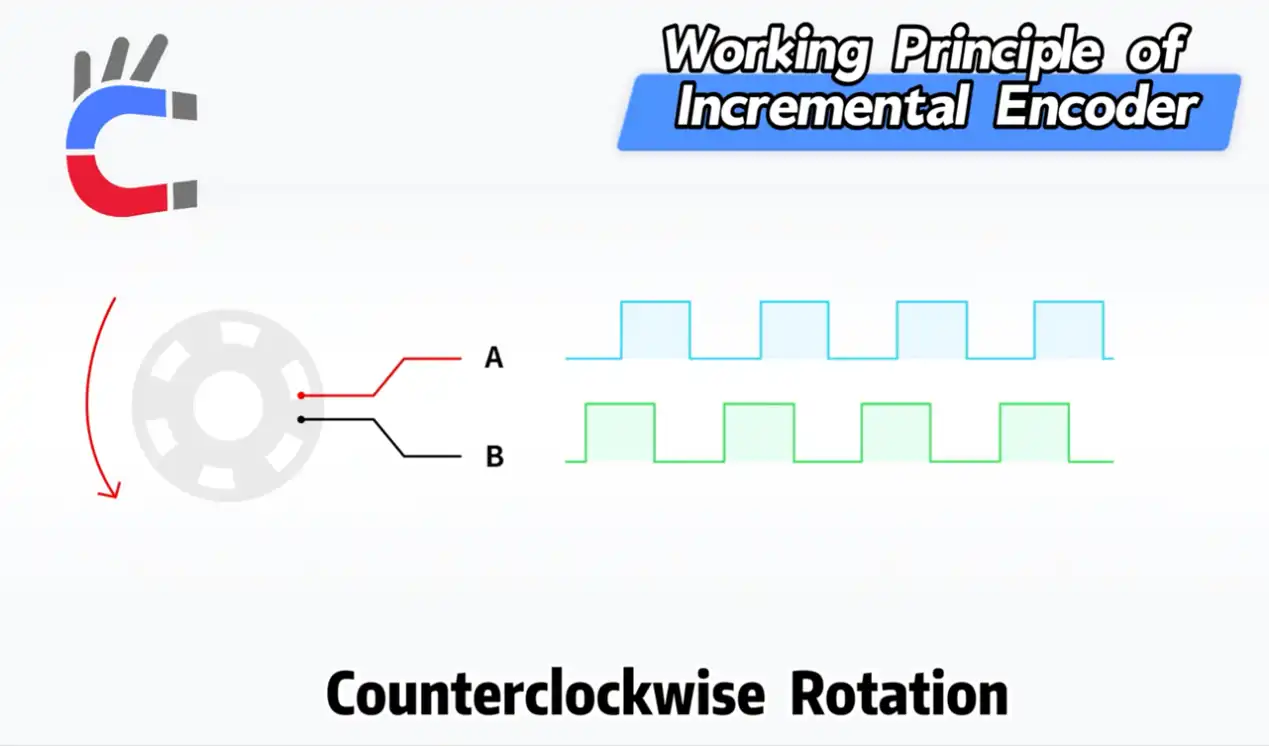
- Определение направления (квадратурное декодирование): Разность фаз 90° между фазой A и фазой B используется для определения направления вращения.
- Вращение по часовой стрелке: Когда фаза A изменяет состояние, если B ≠ A (т.е. фаза B отстает от фазы A), это указывает на вращение по часовой стрелке.
- Вращение против часовой стрелки: Когда фаза A изменяет состояние, если B = A (т. е. фаза A отстает от фазы B или фаза B опережает фазу A), это означает вращение против часовой стрелки.
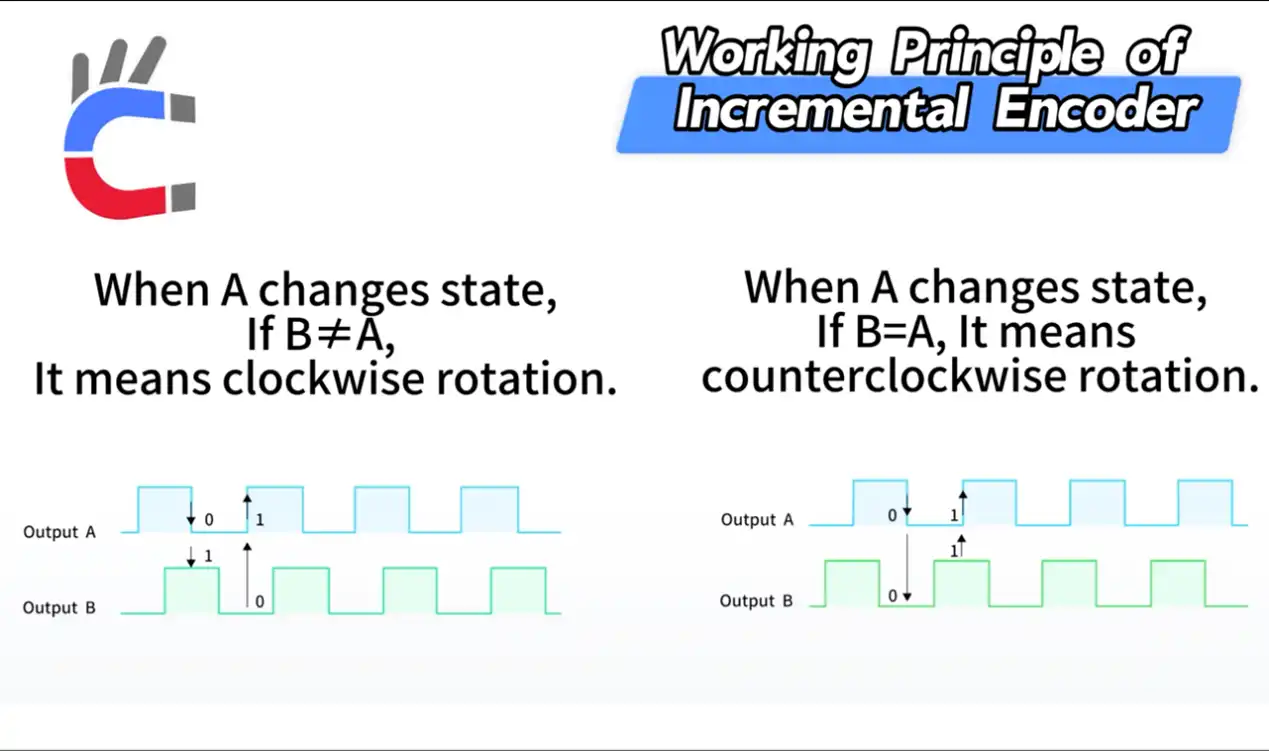
- Вращение по часовой стрелке: Когда фаза A изменяет состояние, если B ≠ A (т.е. фаза B отстает от фазы A), это указывает на вращение по часовой стрелке.
1.2 Характеристики инкрементальных энкодеров
- Относительное положение: Инкрементальные энкодеры предоставляют только информацию об относительном перемещении, то есть о величине изменения перемещения, начиная с последней точки измерения.
- Память при отключении питания: Энкодеры не имеют функции памяти при отключении питания. При отключении питания счетчик импульсов сбрасывается на ноль, и энкодер не может знать текущее положение. После повторного включения питания он должен найти опорную точку (операция самонаведения), чтобы определить абсолютное положение.
- Промышленное применение: Подходит для таких сценариев, как управление скоростью и резка с фиксированной длиной, где знание точного положения в момент запуска не требуется, но требуется точное измерение скорости движения и относительного расстояния.
2. Инкрементный кодировщик с указателем/справочной меткой
Для решения проблемы возврата инкрементальных энкодеров к нулю после отключения питания был введен сигнал "начало" или "нулевое положение", также известный как фаза Z или контрольная метка.
2.1 Принцип работы
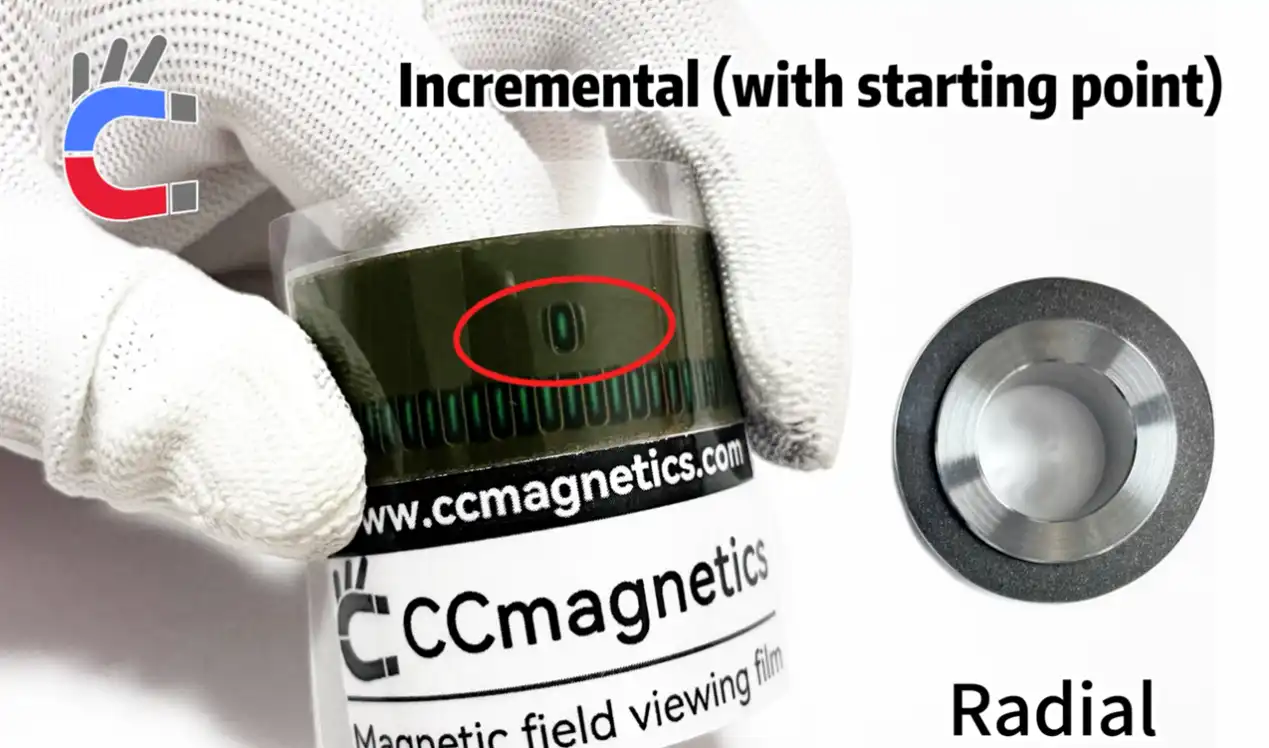
- Фазовый сигнал Z: В дополнение к фазам A и B в магнитное кольцо добавляется уникальный контрольный знак (обычно специальный магнитный полюс или зазор). Она генерирует только один импульсный сигнал за полный оборот, который и является сигналом фазы Z.
- Определение абсолютного положения:
- После включения питания энкодер начинает вращаться.
- Когда появляется импульс фазы Z, система очищает текущий счетчик импульсов до нуля или устанавливает его в известное начальное абсолютное положение. Эта точка импульса Z служит "началом отсчета".
- После этого, считая импульсы A/B, можно узнать абсолютное положение относительно точки начала отсчета.
- Логика практического применения: Упоминаемый в видеоролике "пищащий" звук при запуске принтера - это процесс поиска инкрементальным энкодером точки начала отсчета фазы Z. В промышленном управлении этот процесс называется наведением, и он является важнейшим этапом, который должен быть выполнен до запуска.
2.2 Промышленные приложения
Обычно используется в оборудовании, где требуется операция наведения для создания системы координат, например в станках, роботах и принтерах. Его преимущество заключается в более низкой стоимости по сравнению с абсолютными энкодерами при сохранении возможности получения абсолютного положения с помощью операции самонаведения.
2.3 Обработка сигналов инкрементальных энкодеров: Квадратурное декодирование и умножение
Инкрементальные энкодеры выводят сигналы фазы A, фазы B и фазы Z. Как правило, это дифференциальные сигналы (например, RS-422) для повышения помехоустойчивости.
- Ядро обработки сигналов: Квадратурное декодирование
Контроллер (например, ПЛК или плата управления движением) должен обработать сигналы A/B, чтобы получить информацию о положении и направлении:
- Определение направления: На основе разности фаз (90°) между фазой A и фазой B определить направление вращения (по часовой стрелке/против часовой стрелки).
- Подсчет импульсов: Накапливайте или уменьшайте импульсы в зависимости от направления, чтобы получить общую величину перемещения.
- Повышение точности: Технология умножения
Для повышения точности позиционирования исходные импульсы обычно не подсчитываются напрямую, вместо этого используется технология умножения:
- Умножение 1X: Счет происходит только по нарастающему фронту фазы A.
- Умножение 2X: Счет ведется как по нарастающему, так и по спадающему фронтам фазы A.
- Умножение 4X: Счет ведется по всем фронтам (нарастающему и спадающему) как фазы A, так и фазы B. Это наиболее часто используемый метод, в четыре раза увеличивающий номинальное разрешение энкодера.
Если предположить, что энкодер имеет N импульсов на оборот (PPR), то после применения 4-кратного умножения фактическое разрешение, получаемое контроллером, становится равным 4N отсчетам на оборот (CPR).
- Расчет скорости
Расчет скорости производится путем определения общего количества импульсов, полученных за единицу времени.
$$$ Скорость вращения (RPM) = \frac{Счетчик импульсов \times 60}{Интервал времени (с)\times CPR}$$$.
Скорость вращения (RPM)
- Полное название: Обороты в минуту.
- Значение: Это конечный расчетный результат, представляющий собой количество полных оборотов устройства (например, вала двигателя, колеса) в минуту. Это наиболее часто используемая единица измерения скорости вращения в машиностроении и механике.
Подсчет импульсов
- Значение: Общее количество импульсов, обнаруженных энкодером или датчиком в течение заданного интервала времени.
- Физическое значение: Во время вращения энкодера он выдает один электрический импульс при каждом повороте на определенный угол. Чем больше импульсов, тем больше угол или количество оборотов за тот же промежуток времени.
Интервал времени (с)
- Единица измерения: Секунды (с).
- Значение: Это период времени, который используется для измерения количества импульсов. Например, если вы насчитали 50 импульсов в течение 0,1 секунды, то "временной интервал" здесь равен 0,1 секунды.
СЛР
- Полное название: Counts Per Revolution.
- Значение: Это параметр, присущий используемому энкодеру или датчику. Он показывает, сколько отсчетов выдает устройство за каждый полный оборот (360 градусов).
- Критичность: Это фиксированное значение, которое необходимо определить на основании руководства по техническим характеристикам используемого устройства.
- Нулевое положение / обработка начала отсчета (Z-фаза)
Сигнал Z Phase используется для калибровки абсолютного положения. Во время запуска системы или наведения:
- Система движется на высокой скорости в поисках импульса фазы Z.
- Когда появляется импульс фазы Z (обычно с шириной от 1 до 2 периодов импульса A/B), контроллер немедленно обнуляет счетчик или устанавливает его в заданное абсолютное начальное положение.
3. Абсолютный энкодер
Абсолютный энкодер обеспечивает уникальный цифровой код для представления своего абсолютного положения в течение всего цикла вращения.

3.1 Определение и преимущества абсолютного положения
- Абсолютное положение: Каждое измерение напрямую выводит цифровой код, соответствующий текущему углу, и этот код уникален в диапазоне от 0° до 360°. Для любого заданного угла поворота вала (например, 10,5°, 180°, 359,9°) энкодер выдает единственный в своем роде цифровой код. Каждое положение имеет свой "идентификационный номер".
- Память с отключением питания: Самым большим преимуществом является наличие памяти при отключении питания. Независимо от того, когда подается питание, он может немедленно выдать текущее положение без необходимости наведения.
3.2 Принцип работы абсолютных энкодеров
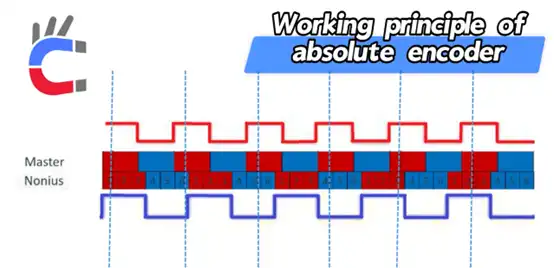
В абсолютных магнитных энкодерах для достижения абсолютного позиционирования обычно используется принцип многодорожечного перемещения или принцип Нониуса. На схеме ниже показан однооборотный абсолютный энкодер, основанный на принципе Нониуса.
3.2.1 Принцип Нониуса
Суть принципа Нониуса заключается в использовании двух магнитных дорожек (магнитных колец) с разным количеством пар магнитных полюсов, определяющих абсолютное положение по разнице периодов сигналов.
- Структура магнитного кольца: Используются две магнитные дорожки:
- Главная дорожка: Предполагается, что количество пар магнитных полюсов равно P (например, 6 пар полюсов, как показано на видео).
- Дорожка Нониуса: Число пар магнитных полюсов равно P-1 (например, 5 пар полюсов, как показано на видео).
- Генерация и вычисление сигналов:
- Тонкое разрешение: Две дорожки генерируют два набора синусоидальных/косинусоидальных сигналов соответственно (например, Sine(MT) и Sine(NT)), которые используются для расчета точного положения в пределах одного периода магнитного полюса. Это достигается с помощью техники интерполяции электрических сигналов.
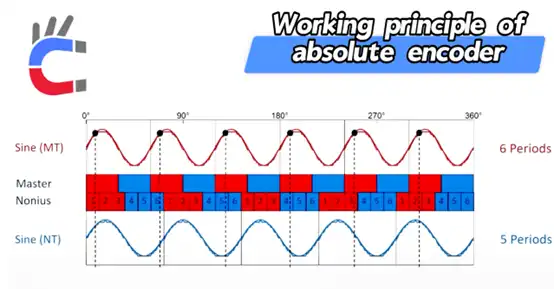
- Грубое разрешение: Поскольку две дорожки имеют разное количество магнитных полюсов, разность фаз между ними будет периодически меняться при их вращении.
- В течение полного цикла вращения на 360° ведущая дорожка и дорожка Нониуса создают общий сдвиг фаз (или разность отсчетов), который изменяется от 0° до 360°.
- Этот уникальный фазовый сдвиг может служить в качестве отсчета периода ведущего магнитного полюса, используемого для определения того, в каком периоде ведущего магнитного полюса в данный момент находится энкодер.
- Тонкое разрешение: Две дорожки генерируют два набора синусоидальных/косинусоидальных сигналов соответственно (например, Sine(MT) и Sine(NT)), которые используются для расчета точного положения в пределах одного периода магнитного полюса. Это достигается с помощью техники интерполяции электрических сигналов.
- Формула расчета абсолютного положения:
Абсолютная позиция = счетчик основных периодов + основная интерполяция
3.3 Типы абсолютных энкодеров
- Однооборотный абсолютный: Измеряет абсолютный угол в диапазоне 0°-360°, но не может регистрировать количество оборотов.
- Многооборотный абсолютный: На основе однооборотного абсолютного позиционирования добавляется зубчатая передача или другой счетный механизм для регистрации числа оборотов, что обеспечивает больший диапазон абсолютного позиционирования.
3.4 Промышленное применение
Абсолютные энкодеры - лучший выбор для высокопроизводительных сервосистем. Их особенность - отсутствие необходимости в самонаведении - значительно повышает эффективность и безопасность оборудования:
- Робототехника и автоматизация: Используются для точного контроля положения шарниров роботов и пролетов рук.
- Станки с ЧПУ: Точная обратная связь по положению главного шпинделя и осей подачи.
- Тяжелое машиностроение: Краны, портовое оборудование и т. д., обеспечивающие сохранение информации о текущем положении при любом отключении питания.
- Коммутация синхронного двигателя с постоянным магнитом (PMSM): После включения питания привода электронная коммутация может быть выполнена непосредственно с использованием информации об абсолютном положении, что обеспечивает немедленный и плавный запуск двигателя.
3.5 Обработка сигналов абсолютных датчиков: Протоколы последовательной связи
Абсолютные энкодеры напрямую выводят цифровые коды положения, поэтому основой обработки их сигналов является протокол связи, обеспечивающий точность и работу передачи данных в реальном времени.
- Типичные протоколы: BiSS-C и SSI
| Протокол | SSI (синхронный последовательный интерфейс) | BiSS-C (двунаправленный/синхронный последовательный интерфейс) |
|---|---|---|
| Тип | Однонаправленная синхронная последовательная связь | Двунаправленная синхронная последовательная связь (наиболее распространенная) |
| Принцип | Контроллер посылает тактовый сигнал, а энкодер синхронно передает данные о положении. | Включает в себя однонаправленную функцию SSI и добавляет обратный канал для чтения и записи параметров энкодера. |
| Характеристики | Простота, стабильность, умеренная производительность в реальном времени. | Высокая скорость, высокая производительность в реальном времени (задержка на уровне наносекунд), используется в высокопроизводительных сервосистемах. |
| Содержание данных | В основном данные о положении. | Данные о положении + контрольная сумма (CRC) + предупреждающая/диагностическая информация. |
- Поток обработки сигнала (на примере BiSS-C)
- Генерация тактового сигнала: Сервопривод (контроллер) генерирует высокоскоростной тактовый сигнал (обычно от нескольких МГц до 10 МГц).
- Запрос данных: Контроллер уведомляет энкодер о необходимости передачи данных через тактовый сигнал.
- Передача данных: Энкодер синхронно передает контроллеру до нескольких десятков бит цифрового кода положения, контрольную сумму CRC и биты состояния неисправности.
- Проверка и синтаксический анализ:
- Проверка CRC: Контроллер выполняет циклическую проверку избыточности полученных данных. Если проверка не проходит, данные считаются неверными, что обычно вызывает сигнал тревоги или использует положение из предыдущего цикла.
- Парсинг: Разбирает поток данных для извлечения высокоточных слов положения, например 24- или 26-битных.
- Применение абсолютных энкодеров в сервоуправлении
Благодаря тому, что абсолютные энкодеры не требуют операции самонаведения, они являются предпочтительным выбором для высокопроизводительных сервосистем:
- Позиционирование при включении питания: После включения сервопривода абсолютный угол двигателя может быть получен через один канал связи, что устраняет необходимость тратить время на наведение.
- Электронная коммутация: Для синхронных двигателей с постоянными магнитами (PMSM) необходимо знать точное начальное положение ротора, чтобы правильно выдать пусковой момент. Абсолютные энкодеры предоставляют эту информацию напрямую, позволяя приводу сразу же выполнить электронную коммутацию и запустить двигатель плавно и немедленно. Инкрементальные энкодеры, напротив, требуют сначала "поиска нуля" или "определения начального угла".
Таким образом, обработка сигналов инкрементных энкодеров сосредоточена на аппаратном подсчете и программном умножении; в то время как обработка сигналов абсолютных энкодеров сосредоточена на высокоскоростной последовательной связи и проверке данных.
4. Обобщенное сравнение: Инкрементные и абсолютные энкодеры
| Характеристика | Инкрементный кодировщик | Инкрементный энкодер с индексной/справочной меткой | Абсолютный энкодер |
|---|---|---|---|
| Выходной сигнал положения | Количество импульсов (относительное положение) | Количество импульсов (относительное положение) | Уникальный цифровой код (абсолютное положение) |
| Выключение питания Память | Нет | Нет | Да |
| Ввод в эксплуатацию | Должен быть дома (поиск фазы Z) | Должен вернуться в исходное положение (поиск фазы Z) | Не требуется |
| Тип сигнала | Фазы A/B (квадратная волна / синус-косинус) | Фазы A/B + фаза Z | Многодорожечный код / нониусный сигнал |
| Сложность и стоимость | Низкая | Средняя | Высокая |
| Типичные применения | Управление скоростью, конвейеры | Наведение станков, принтеры | Шарниры роботов, высокоточное позиционирование |