English
English Deutsch
Deutsch Español
Español Français
Français 한국어
한국어 日本語
日本語
Техническое обслуживание корпуса судна является сложной задачей, часто связанной с работой на большой высоте, на вертикальных и искривленных поверхностях, что создает риски для безопасности и приводит к низкой эффективности при использовании традиционного ручного труда.
Трехколесный магнитный гусеничный робот, благодаря своему уникальному дизайну и основной технологии, предлагает идеальное решение этих проблем. По сравнению с обычными четырехколесными магнитными гусеничными роботами, трехколесная версия лучше подходит для обслуживания судов. Его преимущества очевидны в четырех ключевых областях.
1. Уникальная трехколесная конструкция для сложных поверхностей
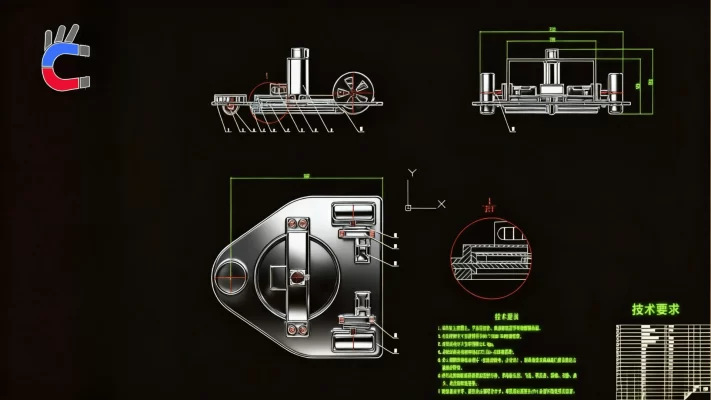
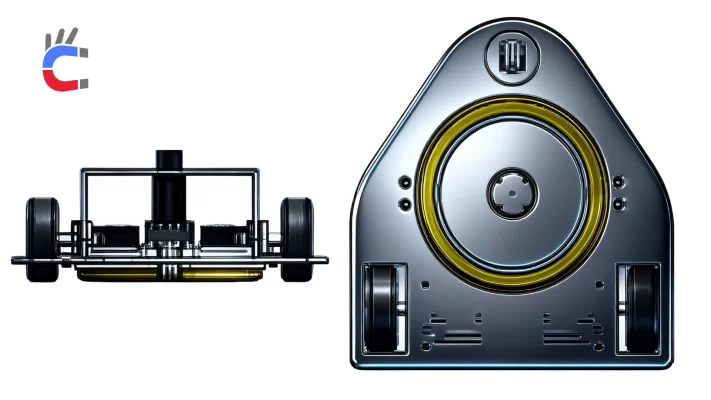
Трехколесный магнитный гусеничный робот отличается асимметричной конструкцией с одним маленьким передним колесом и двумя большими задними колесами. Эта структура точно отвечает требованиям работы на поверхности судна, создавая явное преимущество перед четырехколесными гусеничными роботами.
- Гибкость переднего колеса: Меньшее переднее колесо облегчает рулевое управление, позволяя гусеничному роботу маневренно перемещаться по искривленным поверхностям, таким как нос и корма. Такая конструкция помогает избежать «задержки рулевого управления», характерной для традиционных многоколесных устройств. В отличие от этого, четырехколесные гусеничные роботы с одинаковыми размерами колес склонны к задержкам рулевого управления или даже заносу на поворотах малого радиуса.
- Стабильность задних колес: Большие задние колеса обеспечивают более широкую площадь контакта и в сочетании с противоскользящей конструкцией обеспечивают устойчивую опору на вертикальных или наклонных поверхностях. Это гарантирует, что гусеничный робот остается устойчивым даже при небольших вибрациях, обеспечивая точность очистки и удаления ржавчины. В то время как четырехколесные гусеничные роботы могут справляться с плоскими поверхностями, они имеют плохой баланс на наклонных поверхностях и могут вызвать смещение рабочего модуля.
- Сильная общая адаптивность: Трехколесный гусеничный робот может адаптироваться как к плоским бортам палубы, так и к сильно искривленным поверхностям каюты за счет скоординированного движения колес, устраняя необходимость в частой смене оборудования или настройке режима. Четырехколесные гусеничные роботы часто имеют мертвые зоны в сложных областях, потому что их большие колеса не могут адекватно «обхватить» поверхности с малой кривизной, что требует ручной помощи для настройки.

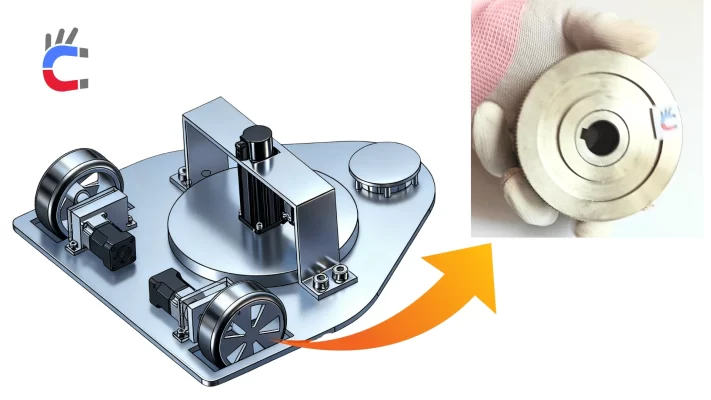
Магнитная передача
2. Мощная технология магнитной адгезии для вертикальных операций
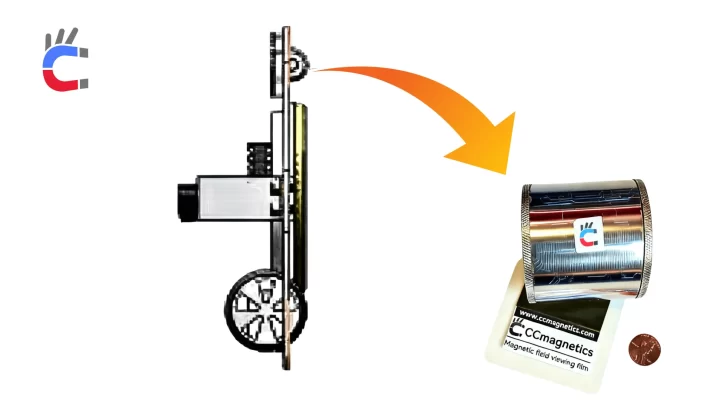
Мощные магниты, встроенные в каждое
магнитное колесо, являются основным конкурентным преимуществом трехколесного магнитного гусеничного робота. Его адгезионная конструкция отлично совместима со сложной средой поверхности судна.
- Высокая адгезия для безопасности: Магнитное колесо прочно прилипает к стальной поверхности судна, предотвращая падение транспортного средства даже при работе на вертикальной стене 90° или в перевернутом положении. Это полностью исключает риски безопасности при ручной работе на весу.
- Адаптивность к сложным средам: На адгезию магнитного колеса не влияют влажные или слегка ржавые поверхности корпуса, что обеспечивает непрерывную работу. Для сравнения, четырехколесные магнитные гусеничные роботы с их большей площадью контакта могут терять локальную адгезию, если на поверхности есть выступающие пятна ржавчины, что может привести к колебаниям адгезии и потребовать частых проверок.
3. Многозадачная интеграция для повышения эффективности обслуживания
Трехколесный магнитный гусеничный робот — это многофункциональная платформа, которая может интегрировать различные рабочие модули.
- Эффективная очистка: Оснащенный модулями распыления высокого давления или щетками, он может быстро удалять морские биообрастания с корпуса, при этом эффективность очистки в 3-5 раз выше, чем при ручном труде, и меньше слепых зон.
- Точное удаление ржавчины: Он может быть оснащен небольшими шлифовальными или пескоструйными компонентами для точной обработки локальной ржавчины, избегая повреждения покрытия, которое может возникнуть в результате традиционного удаления ржавчины на большой площади.
- Одновременная инспекция: Гусеничный робот может интегрировать камеры высокой четкости или датчики для сбора данных о поверхности корпуса во время очистки и удаления ржавчины, что позволяет своевременно обнаруживать трещины или вмятины. Это предлагает интегрированное решение «обслуживание + обнаружение».

4. Снижение зависимости от ручного труда для оптимизации затрат и безопасности
Автоматизированная конструкция трехколесного магнитного гусеничного робота эффективно решает проблемы высоких затрат и рисков безопасности, связанных с традиционным ручным обслуживанием.
- Снижение трудозатрат: Один гусеничный робот может заменить двух-трех рабочих и может управляться дистанционно.
- Снижение рисков безопасности: Поскольку персоналу не нужно работать на высоких или вертикальных поверхностях, риски несчастных случаев на высоте принципиально исключены. Меньший размер и легкий вес трехколесного гусеничного робота также облегчают его извлечение и ремонт в случае неисправности.
- Контролируемые расходы на обслуживание: Трехколесный гусеничный робот не требует частой замены расходных материалов и имеет длительный срок службы батареи, что делает стоимость его долгосрочного использования значительно ниже, чем ручного труда.
Заключение
От структурной адаптивности и безопасности магнитной адгезии до многозадачной эффективности и контроля затрат, трехколесный магнитный гусеничный робот лучше соответствует основным потребностям обслуживания судов, чем четырехколесный магнитный гусеничный робот. Он не только решает проблемы традиционной работы, но и преодолевает ограничения четырехколесных гусеничных роботов в адаптации к сложным изгибам.
Если вы приобретете наши магнитные колеса для магнитных гусеничных роботов, мы бесплатно предоставим чертежи CAD и Solid Works 3D для трехколесного магнитного гусеничного робота.